

Tracked motion platform with variable topology structure
A motion platform and crawler technology, applied in the field of mobile equipment, can solve the problems of poor robot crossing, complex structure, and weak ability to climb stairs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
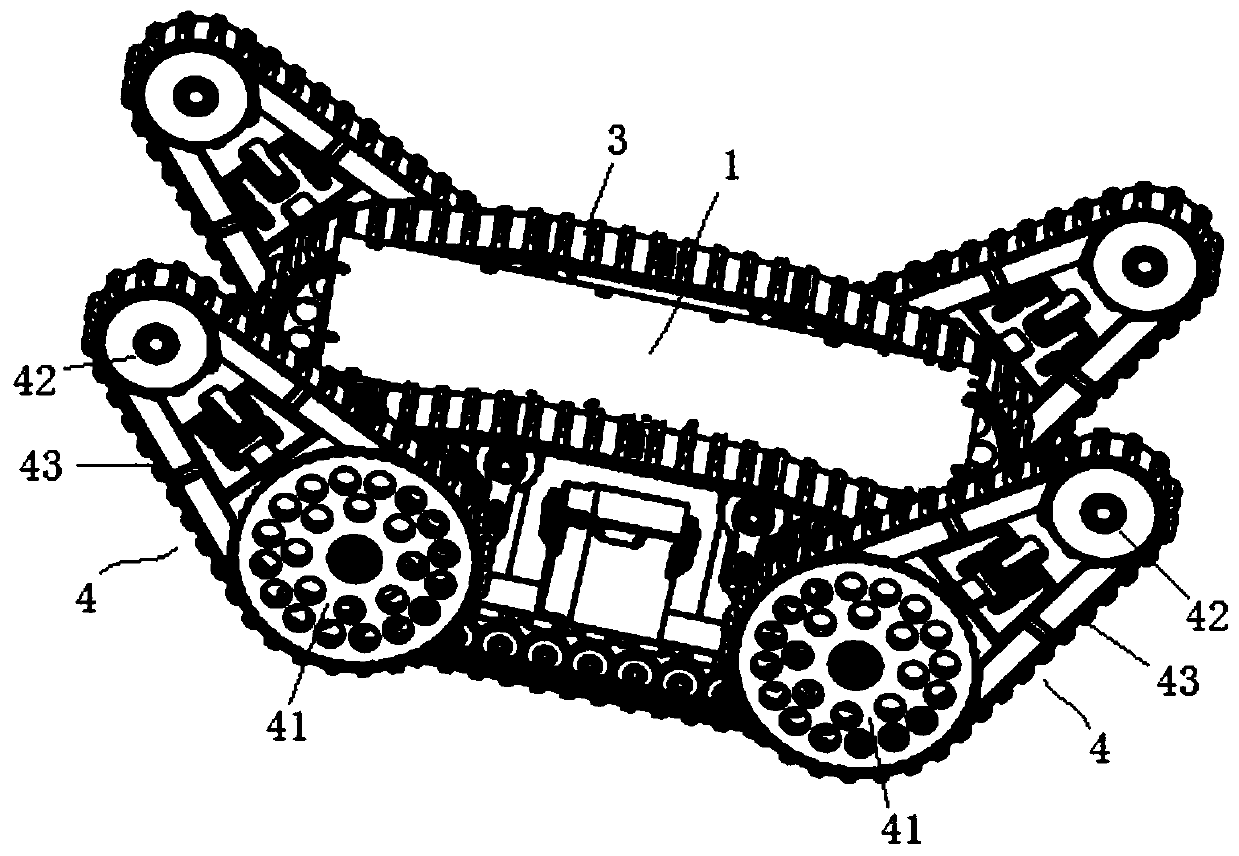
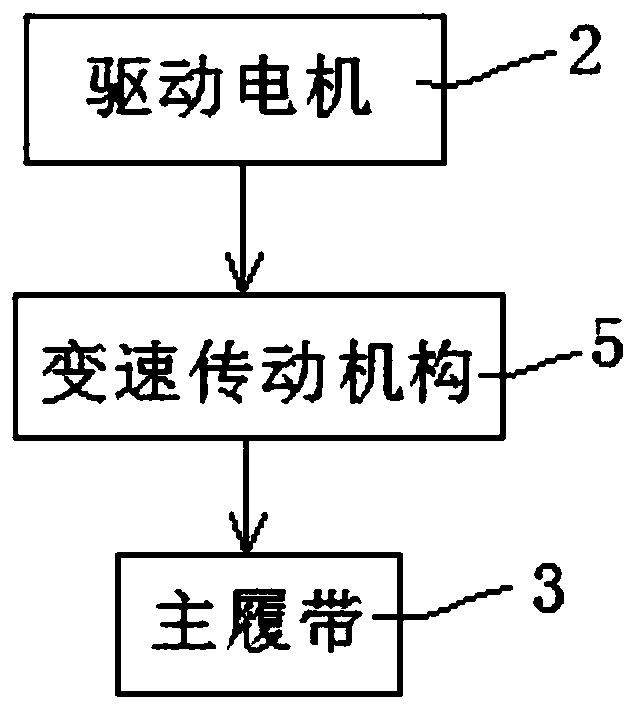
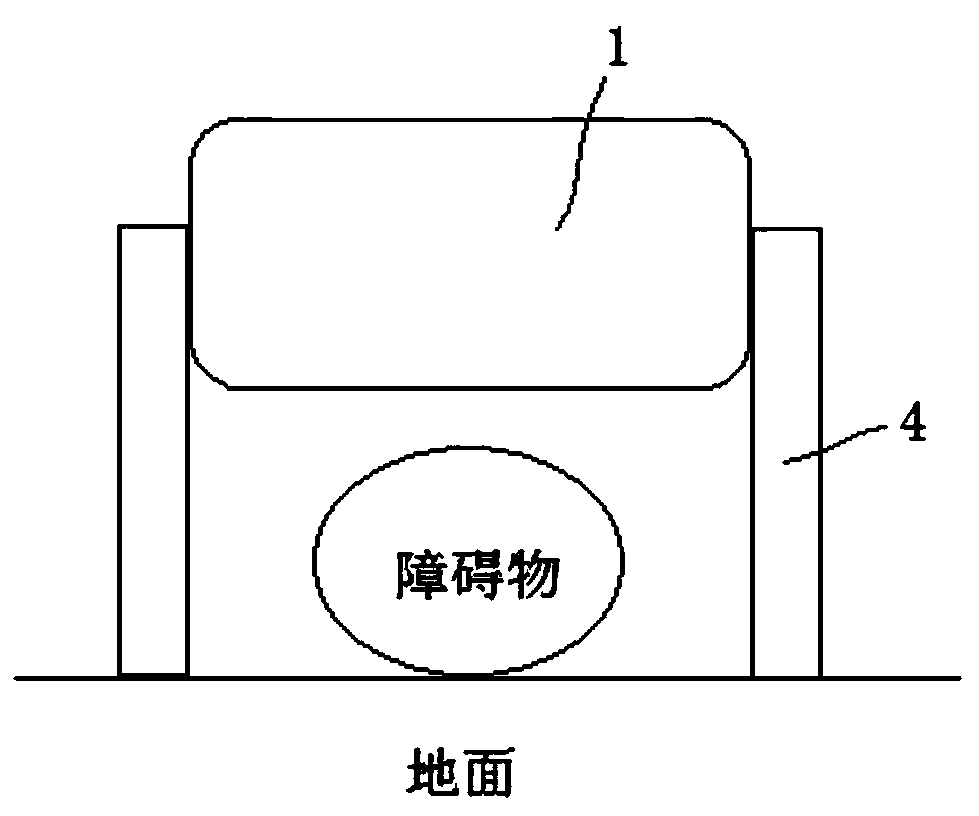
[0022] Such as figure 1 , figure 2 As shown, a crawler-type motion platform with variable topology structure includes a car body, a front turning arm group, and a rear turning arm group; the car body includes a car body frame 1, a drive motor 2, a transmission mechanism 5, and is symmetrically installed on The main crawlers 3 on both sides of the car body frame 1; the front turning arm group and the rear turning arm group respectively include two crawler-type turning arms 4 symmetrically arranged on both sides of the front and rear ends of the car body frame 1. The speed change transmission mechanism 5 is connected with the driving motor 2 and the main crawler belt 3. The crawler-type turning arm 4 can rotate around the rotation axis and be positioned at any angle position. The vehicle body frame 1 can realize its chassis height through the crawler-type turning arm 4. Continuous change, the motion platform can realize the horizontal length change through the crawler-type tur...
Embodiment 2
[0027] A crawler-type motion platform with a variable topology structure, including a car body, a front turning arm group, and a rear turning arm group; the car body includes a car body frame 1, a driving motor 2, and is symmetrically installed on both sides of the car body frame 1 The main crawler belt 3; the front turning arm group and the rear turning arm group respectively include two crawler-type turning arms 4 symmetrically arranged on both sides of the front and rear ends of the car body frame 1, and the drive motor 2 is connected with the main crawler belt 3 , the crawler-type turning arm 4 can be rotated around the rotation axis and positioned at any angular position, the car body frame 1 can realize the continuous change of its chassis height through the crawler-type turning arm 4, and the motion platform can use the crawler-type turning arm 4 to Implement horizontal length changes.
[0028] Wherein, the crawler-type overturning arm 4 comprises a driving wheel 41, a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More