

Multicamera system and laser radar combined system and combined calibration method thereof
A laser radar and joint system technology, applied in the computer field, can solve problems such as inability to complete camera internal reference and external reference, calibration, multi-camera system with less common field of view, etc., to save calibration time and process, ensure accuracy, and simplify calibration steps Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
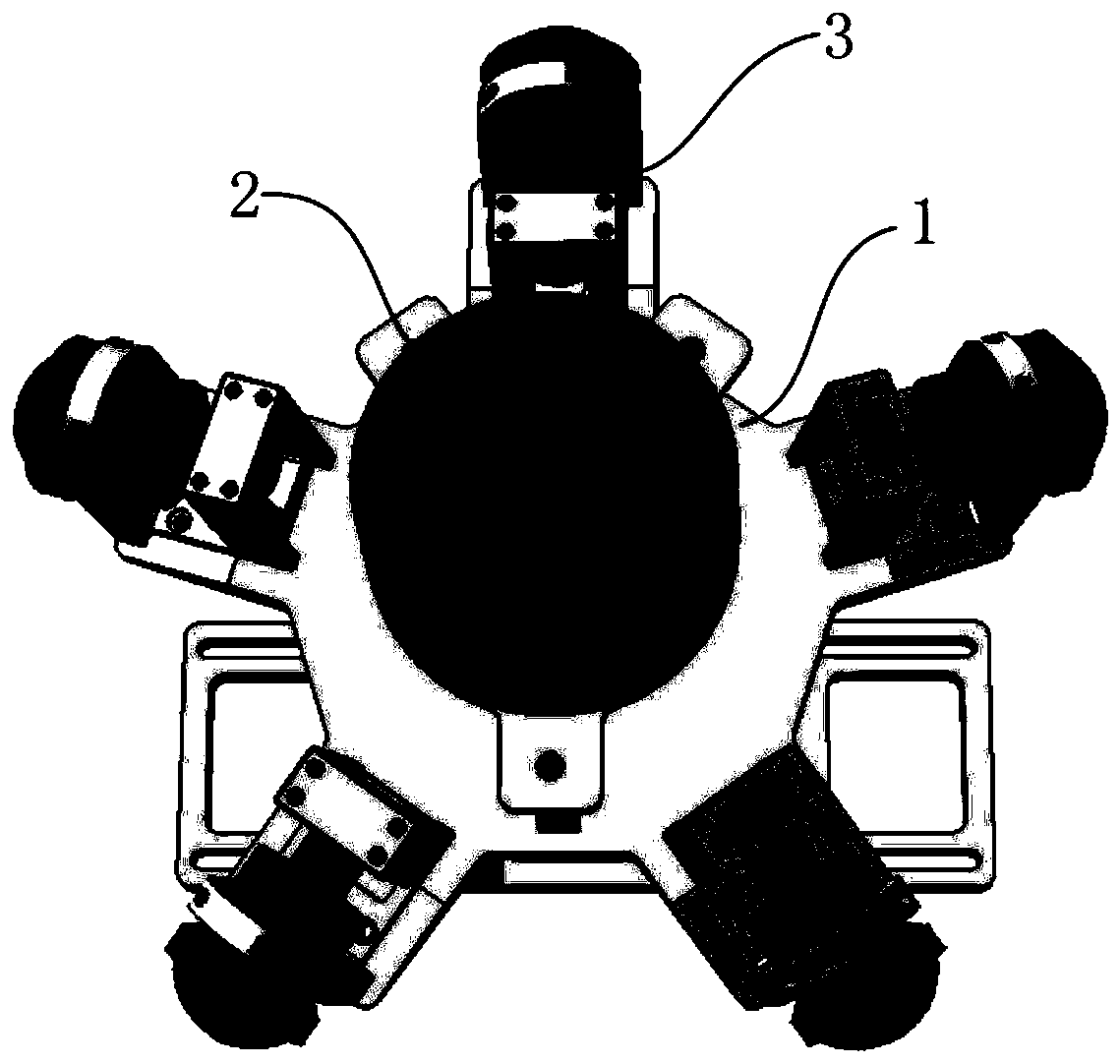
[0033] Such as Figure 1-3 As shown, the present invention discloses a multi-camera system and laser radar combined system, said combined system includes five sets of industrial cameras 3 and one set of laser radar 2, industrial cameras 3 and laser radar 2 are installed on the fixed bracket 1 , the industrial cameras 3 are installed on the outside of the laser radar 2 in an equicentric distribution with the laser radar 2 as the center.
[0034] Among them, the lidar 2 is a 2.5D lidar or a 3D lidar, and the vertical field of view of the lidar 2 is 10°-40°.
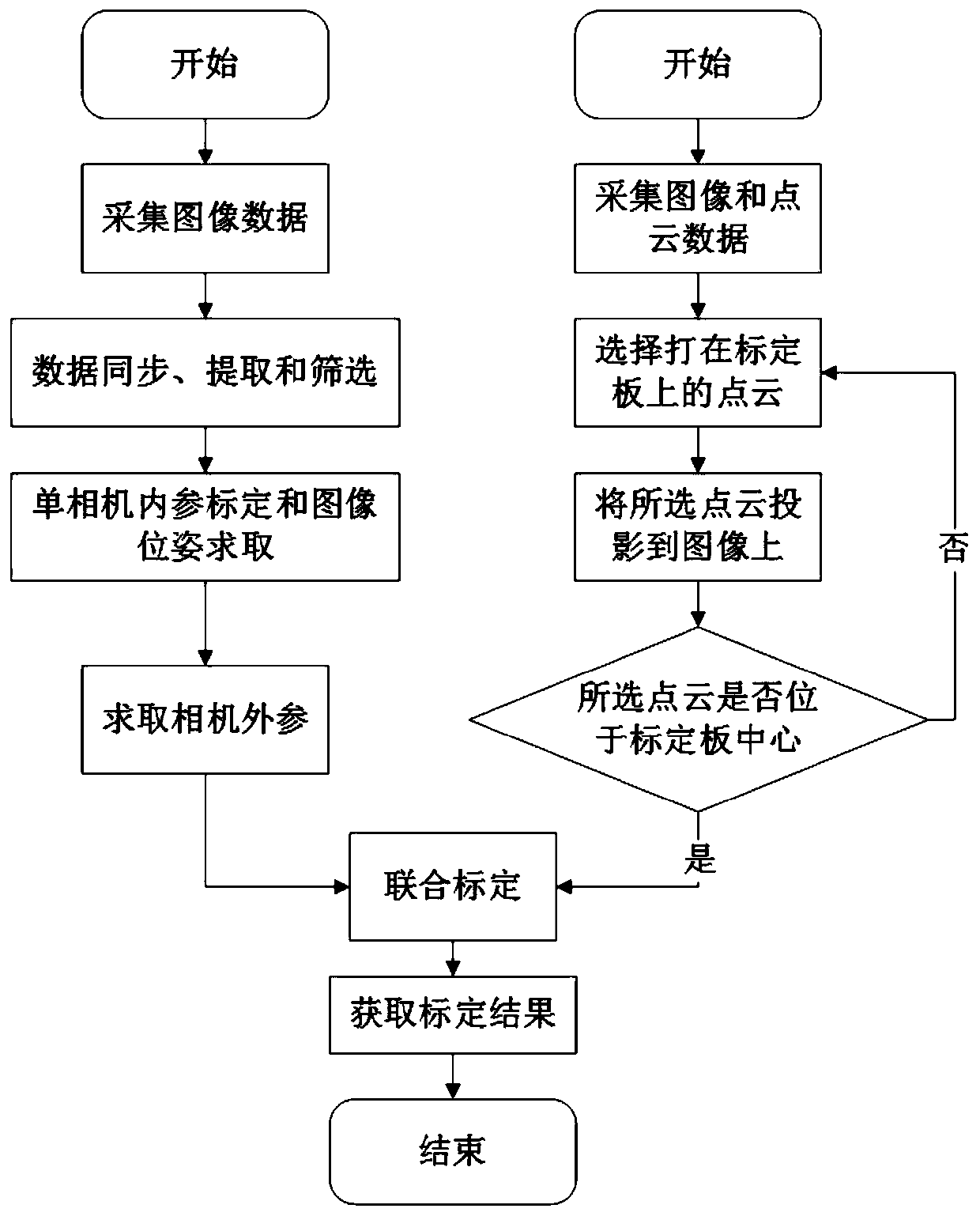
[0035] The present invention also discloses a multi-camera system and lidar joint calibration method, which adopts the above-mentioned joint system, and specifically includes the following steps:
[0036] S1. Install the fixed joint system, turn on the synchronous shooting function of the industrial camera 3, place the special calibration board outside the joint system, adjust the distance between the special calibration b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More