

A heading control method for underactuated ships based on desired heading correction
A heading control, underactuated technology, applied in adaptive control, general control system, control/adjustment system, etc., can solve problems such as heading deviation, reduce the heading angle error, avoid the ship deviates from the route, and has fewer parameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
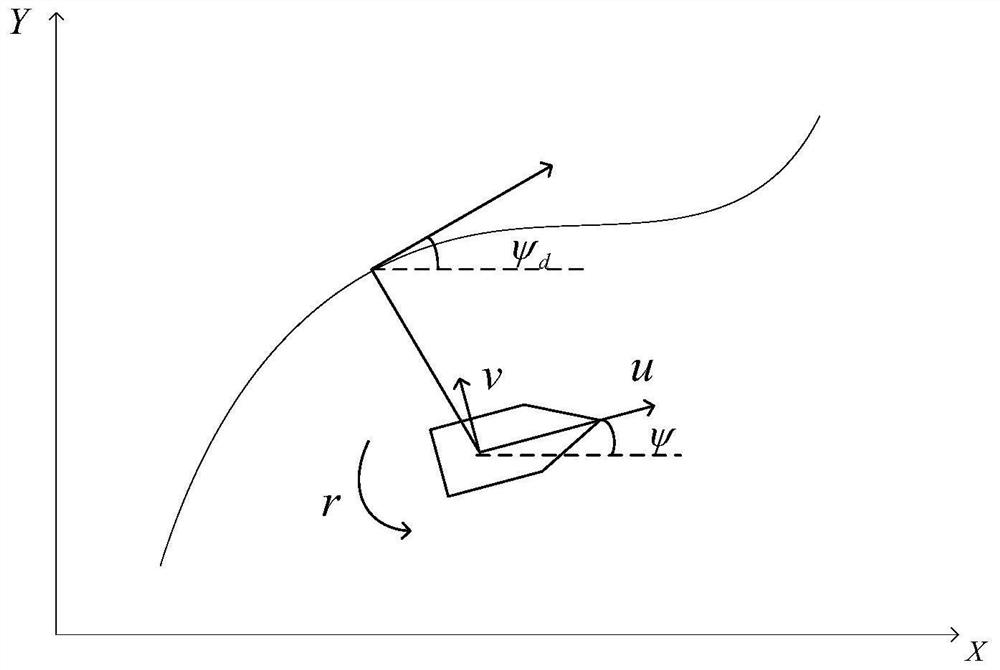
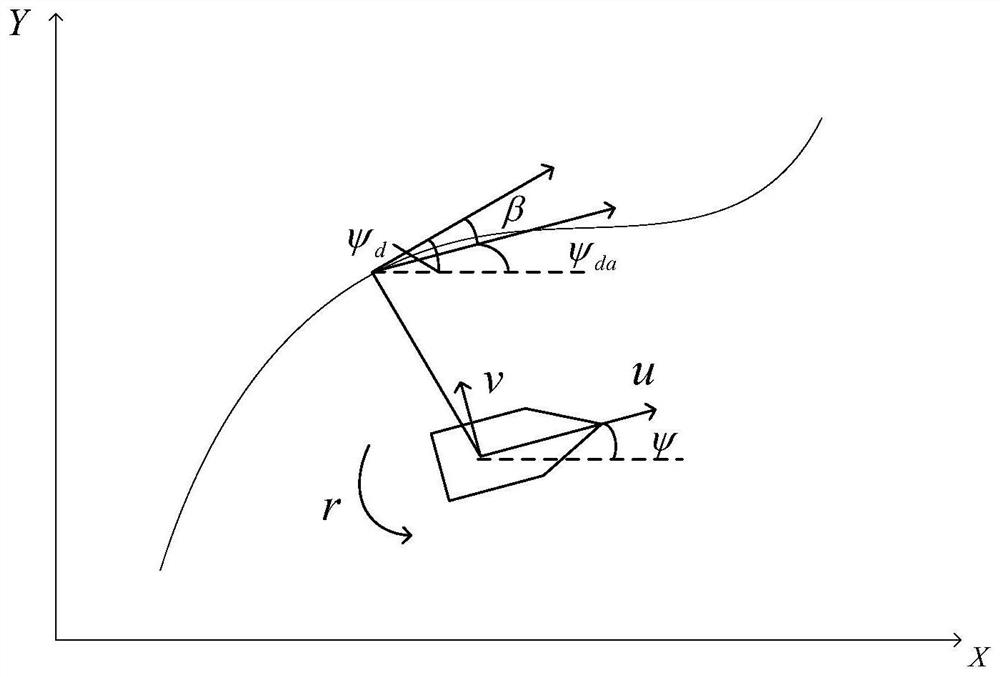
[0045] The present invention proposes an underactuated ship heading control method based on desired heading correction, which starts with a simplified mathematical model description for the convenience of control design, and then redefines the desired heading after calculating the drift angle, and corrects the dynamic model of the underactuated ship. Aiming at the disturbance existing in the yaw direction, the nonlinear disturbance observer is used to estimate and process it. To ensure the tracking performance, the heading controller is designed based on the backstepping method, and combined with the observer to form a complete control system. Include the following steps:
[0046] Step 1. Establish a 2-DOF underactuated ship mathematical model;
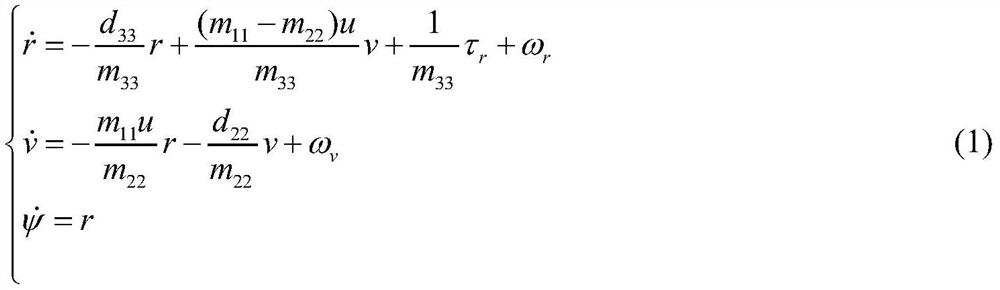
[0047] Assuming that the heave, roll, and pitch motions are negligible, the underactuated ship dynamics model can be simplified to two degrees of freedom motion in the direction of sway and yaw. The mathematical model (in the hull coo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More