

Pilot-following system and pilot-following control method for mobile robot
A mobile robot and follow-up control technology, applied in the field of physical information systems, can solve the problem of robot system designers deploying computing components in a distributed manner without motivation, and achieve the effects of reducing cost, high robustness, and improving formation performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be described in further detail below in conjunction with the accompanying drawings. The specific embodiments described here are only used to explain the present invention, not to limit the present invention.
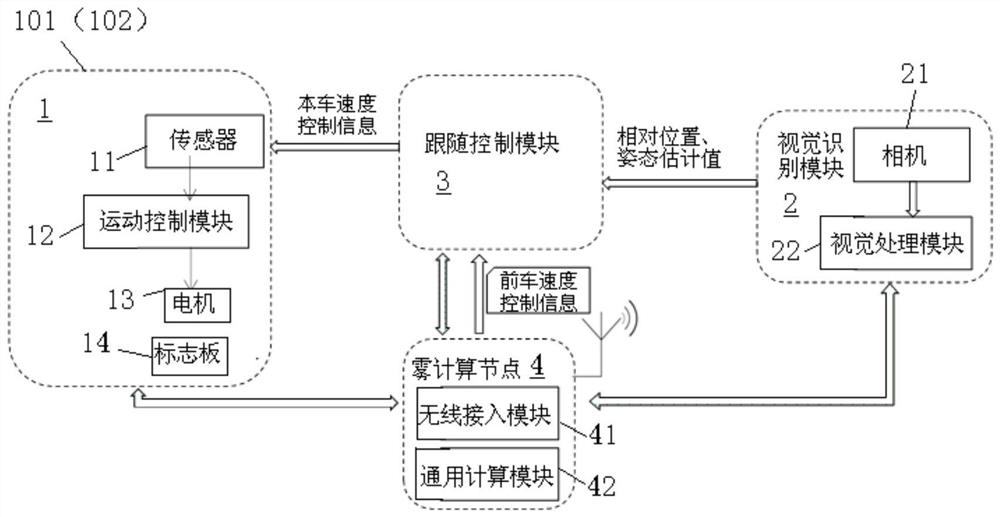
[0051] Such as figure 1 Shown is a mobile robot pilot following system according to an embodiment of the present invention, which is suitable for robot formation following driving in scenarios such as cargo transportation, rescue, navigation, etc., and is used to overcome the need to obtain the overall situation of mobile robots in the existing pilot following methods. Absolute position, attitude, and difficulty following the same trajectory when turning.
[0052] The leader-following system of the mobile robot includes: a robot 1 , a vision recognition module 2 and a follow-up control module 3 , which are divided into a leader robot 101 at the forefront in the formation and a plurality of follower robots 102 .
[0053] Wherein, each r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More