Method of adjusting gait of walking assistive exoskeleton based on intelligent walking sticks
An adjustment method and exoskeleton technology, applied to crutches, appliances to help people walk, passive exercise equipment, etc., can solve the problems that the practicability and ease of use of the exoskeleton cannot be improved, and the gait of the exoskeleton cannot be adjusted. , to achieve the effect of improving practicability and ease of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
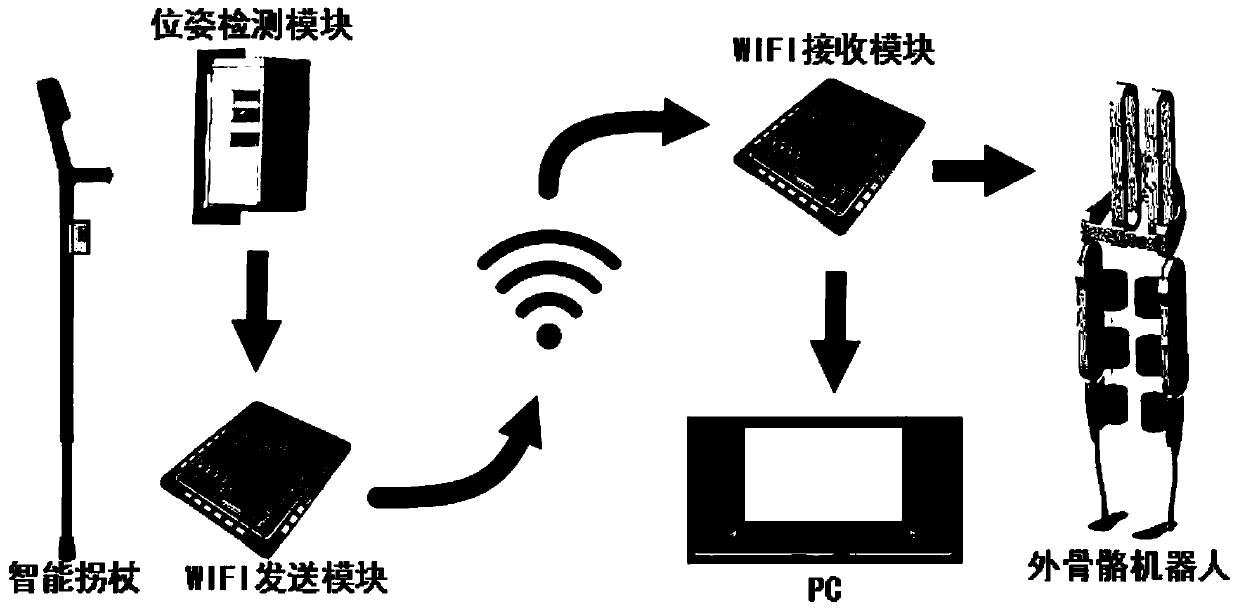
[0020] see Figure 1-Figure 4 As shown, the walking aid exoskeleton gait adjustment method based on smart crutches, which includes:
[0021] (1) Wearing a lower limb walking exoskeleton robot and using smart crutches to support the body;
[0022] (2) When walking, swing a crutch forward. After the crutch touches the ground, the ground contact switch at the bottom of the crutch is closed, and the angle data is sent to the exoskeleton robot;
[0023] (3) The exoskeleton robot receives the angle data from the crutches and adjusts the stride;
[0024] (4) Close the manual switch of the walking mode, and the exoskeleton robot will move forward;
[0025] (5) Swing alternately with both crutches, repeat steps (2)-(4) to complete walking;
[0026] (6) To stop walking and restore the standing mode, close the manual switch of the standing mode of the right turn, and the exoskeleton robot will change from the walking mode to the standing mode;
[0027] (7) When you want to change the...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap