

An event-triggered control method for an input-saturated multi-single-arm manipulator
A technology of event triggering and control methods, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as no solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
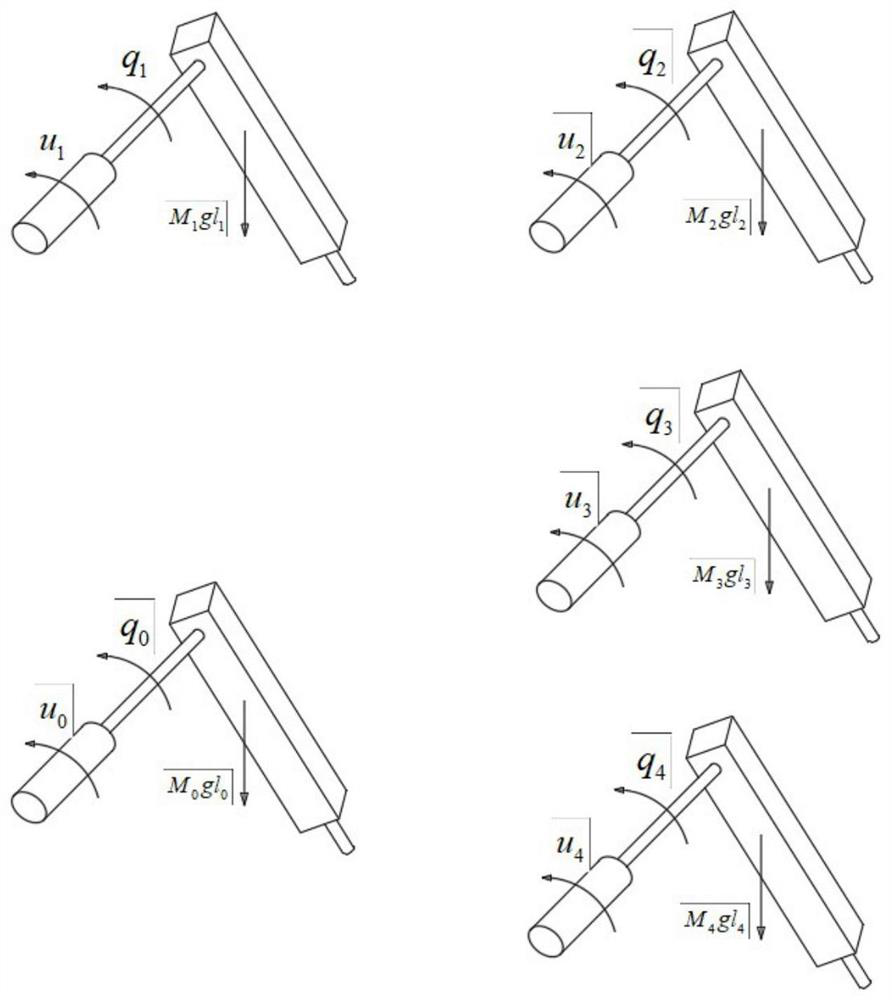
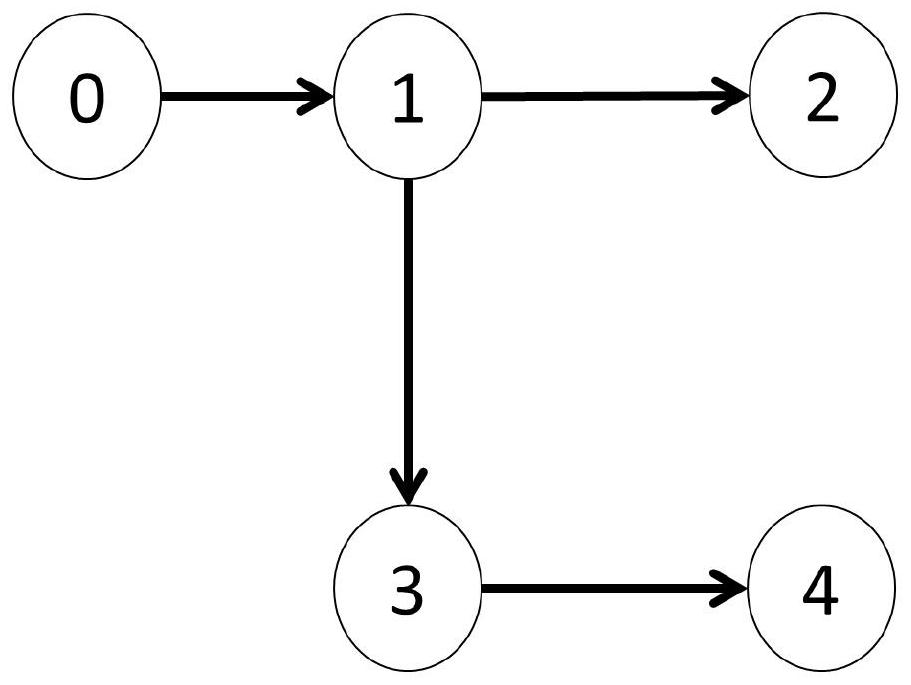
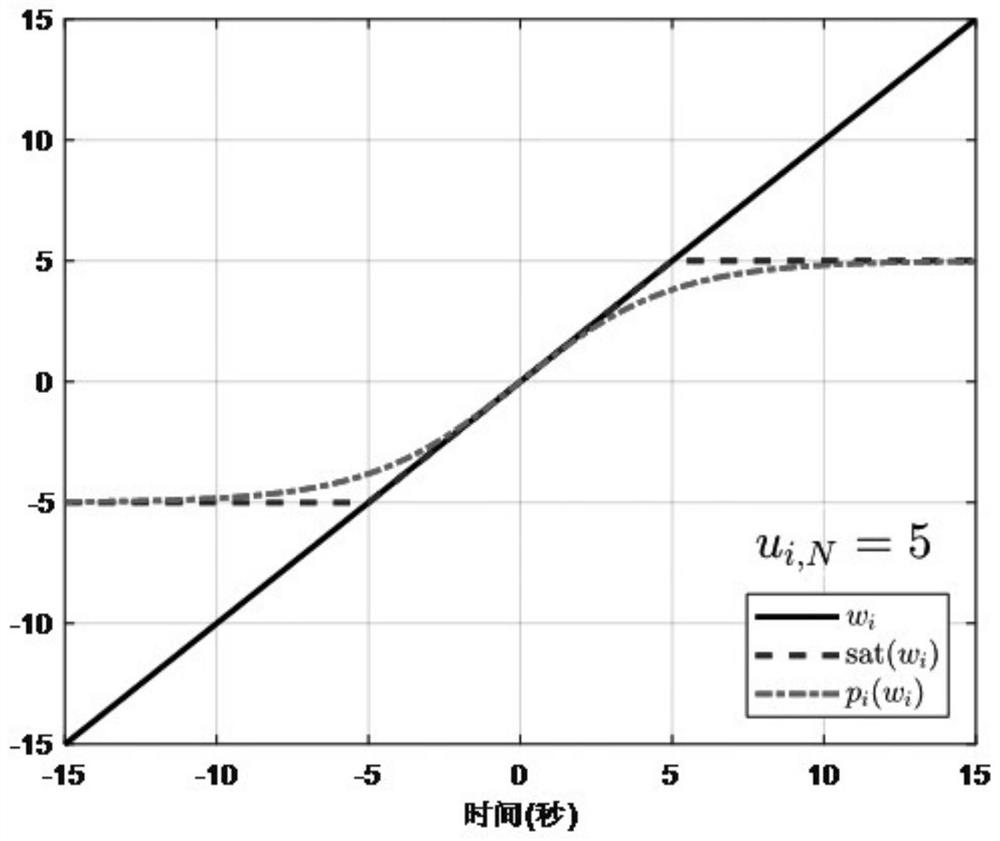
[0081] This embodiment proposes an event-triggered control method for multi-single-arm manipulators based on Lyapunov stability analysis based on Lyapunov stability analysis. This method first designs a disturbance observer to observe unknown disturbances, and then combines dynamic surface control and self-adaptive The control signal is designed by the backstepping method; secondly, the relative threshold event trigger control strategy is used to solve the problem of limited communication resources, and a saturation compensation system is introduced to reduce the impact of input saturation; finally, the Lyapunov stability theorem is used to prove that all signals of the closed-loop system are globally consistent and ultimately Bounded and uniform tracking errors converge to a compact set near the origin. The simple implementation of the formula is illustrated in the accompanying drawings, but it does not represent a specific implementation, nor is it limited to this implementat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More