

Random finite time fuzzy adaptive control method for asynchronous motor based on instruction filtering
An asynchronous motor, fuzzy self-adaptive technology, applied in the direction of motor control, motor generator control, AC motor control, etc., can solve the problems that errors cannot be eliminated, filter errors, and affect control effects, etc., to reduce filter errors and improve control Accuracy, the effect of realizing the tracking of the position signal
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
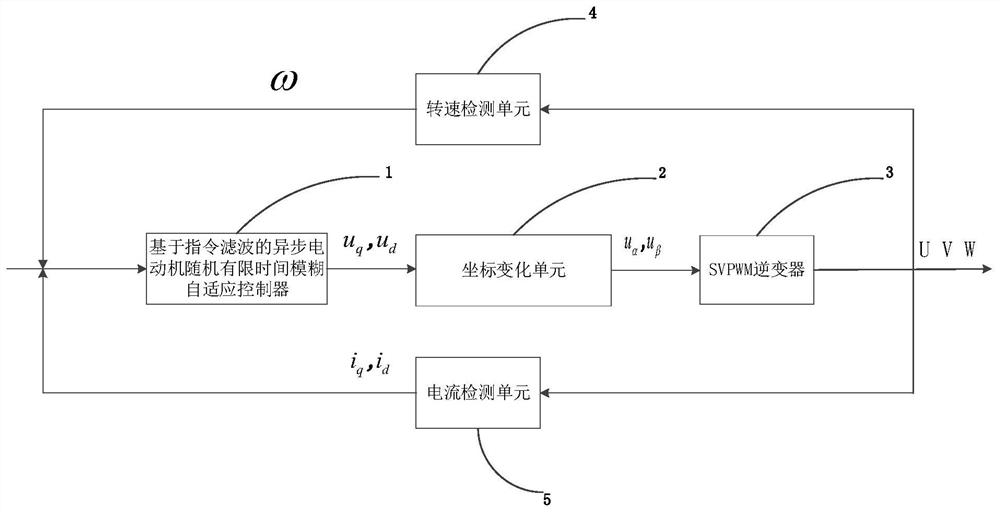
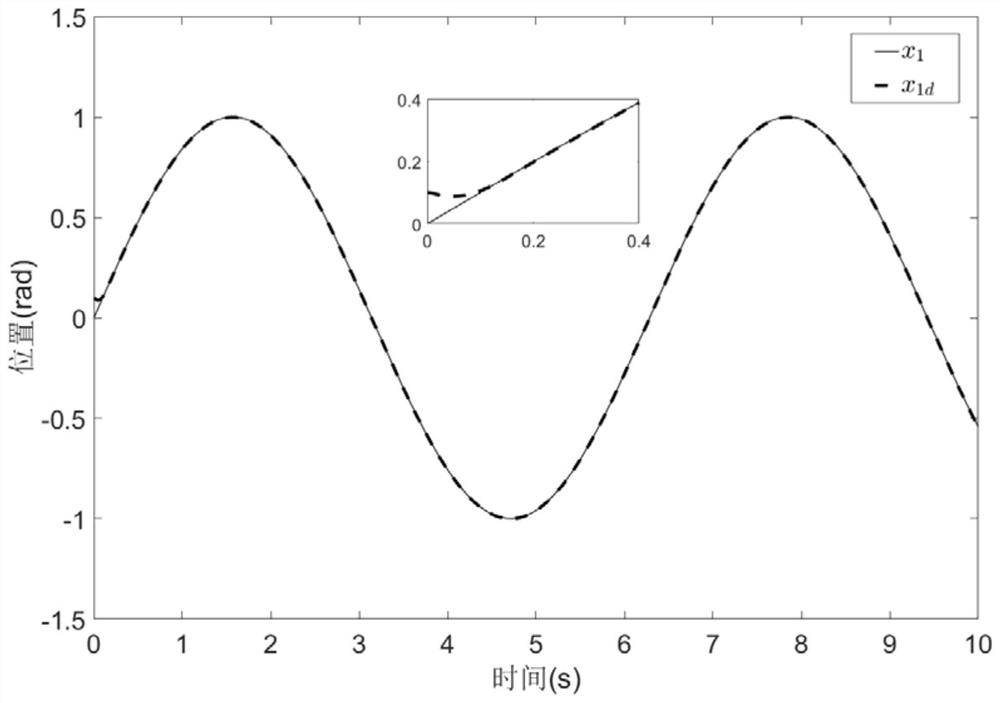
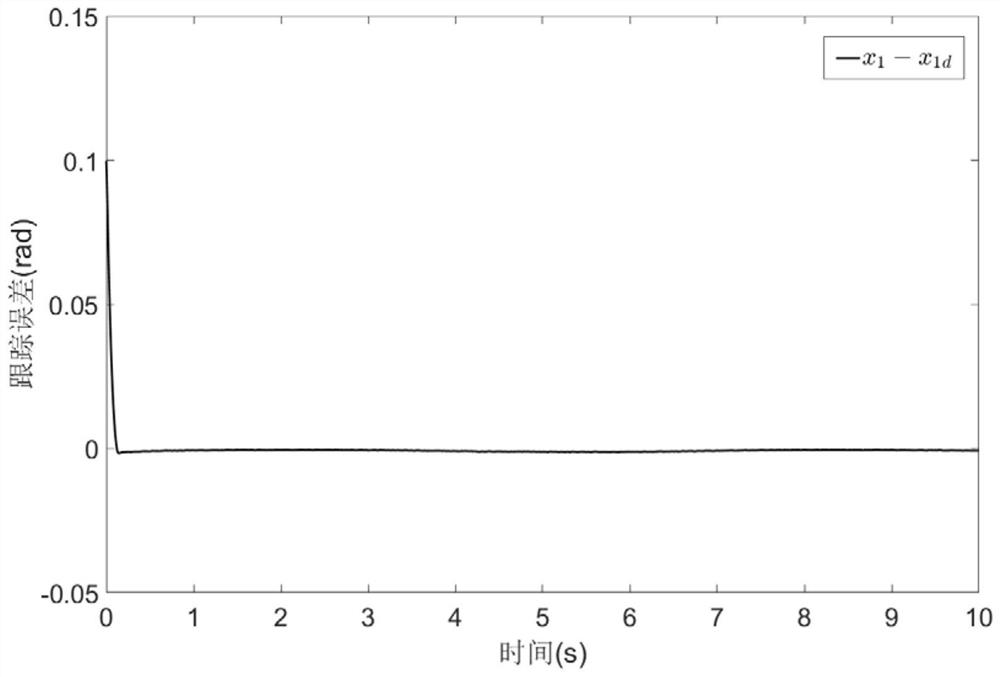
[0146] The basic idea of the present invention is: by combining the self-adaptive backstepping method and the command filter technology and applying it to the position tracking control of the asynchronous motor, to solve the problems of parameter uncertainty, external load change and traditional feedback in the drive system of the asynchronous motor. The calculation explosion problem existing in the step method; the method of the present invention considers the adverse effect brought by the random disturbance to the asynchronous motor, and introduces the finite time control technology, so that the tracking error can converge to the very small field of the origin within a finite time, so that The control method of the invention has higher engineering practice value and obtains ideal tracking effect.
[0147] Such as figure 1It shows the schematic diagram of the complex controlled object composed of command filtering-based stochastic finite-time fuzzy adaptive backstepping con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More