

Improved path optimization method for RRT algorithm
A path optimization and algorithm technology, applied in two-dimensional position/course control, vehicle position/route/altitude control, advanced technology, etc., can solve the problem of increasing path expansion time, not considering waypoints, and not considering multiple times. Repeating problems such as the same waypoint to shorten the time and improve the search efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings.
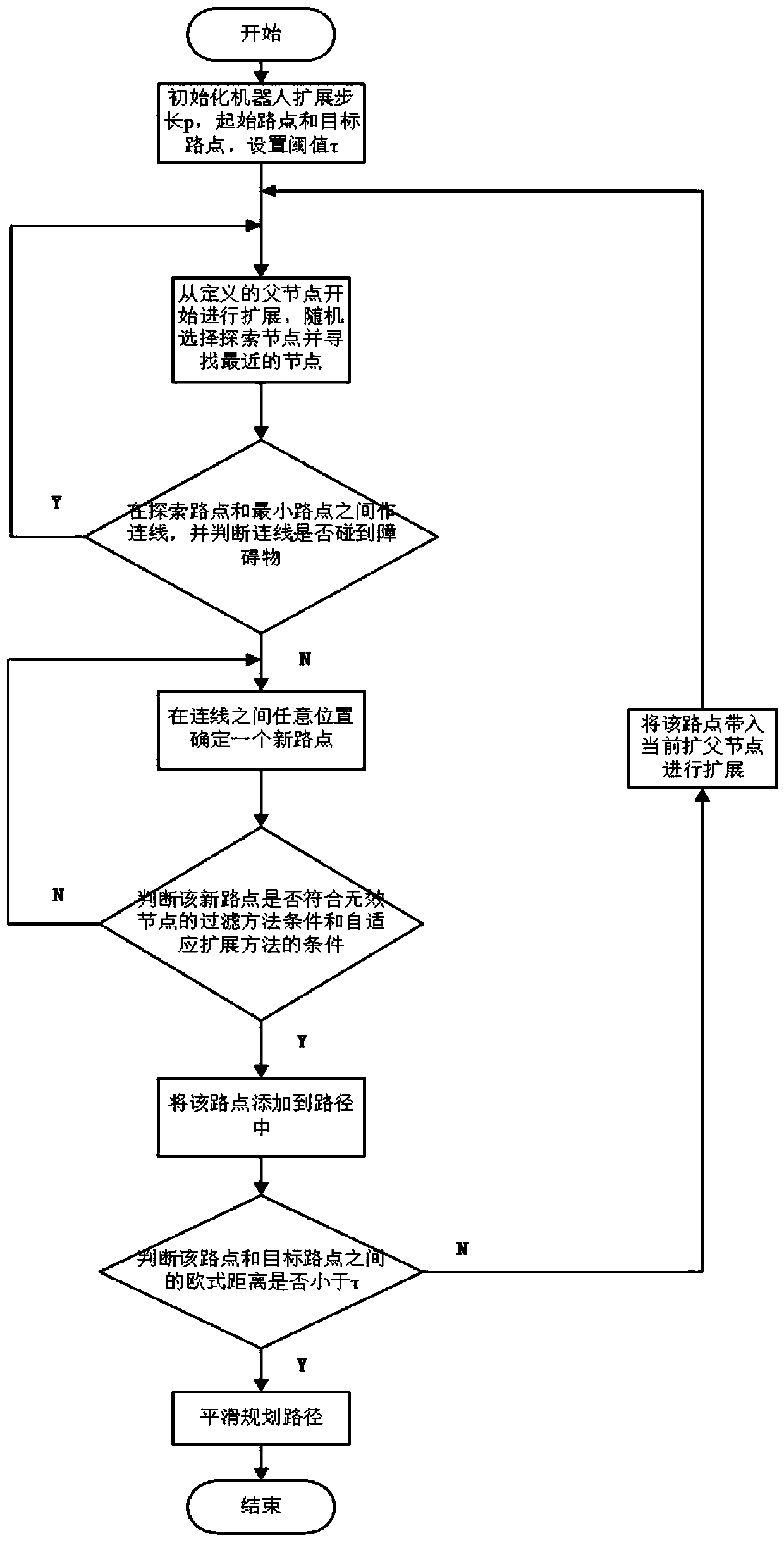
[0042] figure 1 It is a flow chart of the route optimization method improved for the RRT algorithm in the present invention. from figure 1 It can be seen that the present invention provides a path optimization method improved for the RRT algorithm. In the RRT algorithm, a filtering method for invalid waypoints and an adaptive expansion method are introduced to improve path search efficiency. The specific steps are as follows:
[0043] Step 1, parameter setting
[0044] Initialize the robot's extended step size p, and set the starting waypoint X init , target waypoint X goal and threshold τ. The threshold τ=P / 3.
[0045] Step 2, let the random tree T expand to the target waypoint X goal The number of expansions required is n, that is, through n expansions, the random tree T is expanded to the target waypoint X goal , and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More