

Unmanned aerial vehicle formation searching and task scheduling method
A task scheduling and UAV technology, applied in the field of UAV target search, can solve problems such as prolonging the search time, and achieve the effects of shortening the return time, good sustainability, and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0044] The embodiment of the present invention provides a UAV formation search and task scheduling method, which specifically includes the following steps:
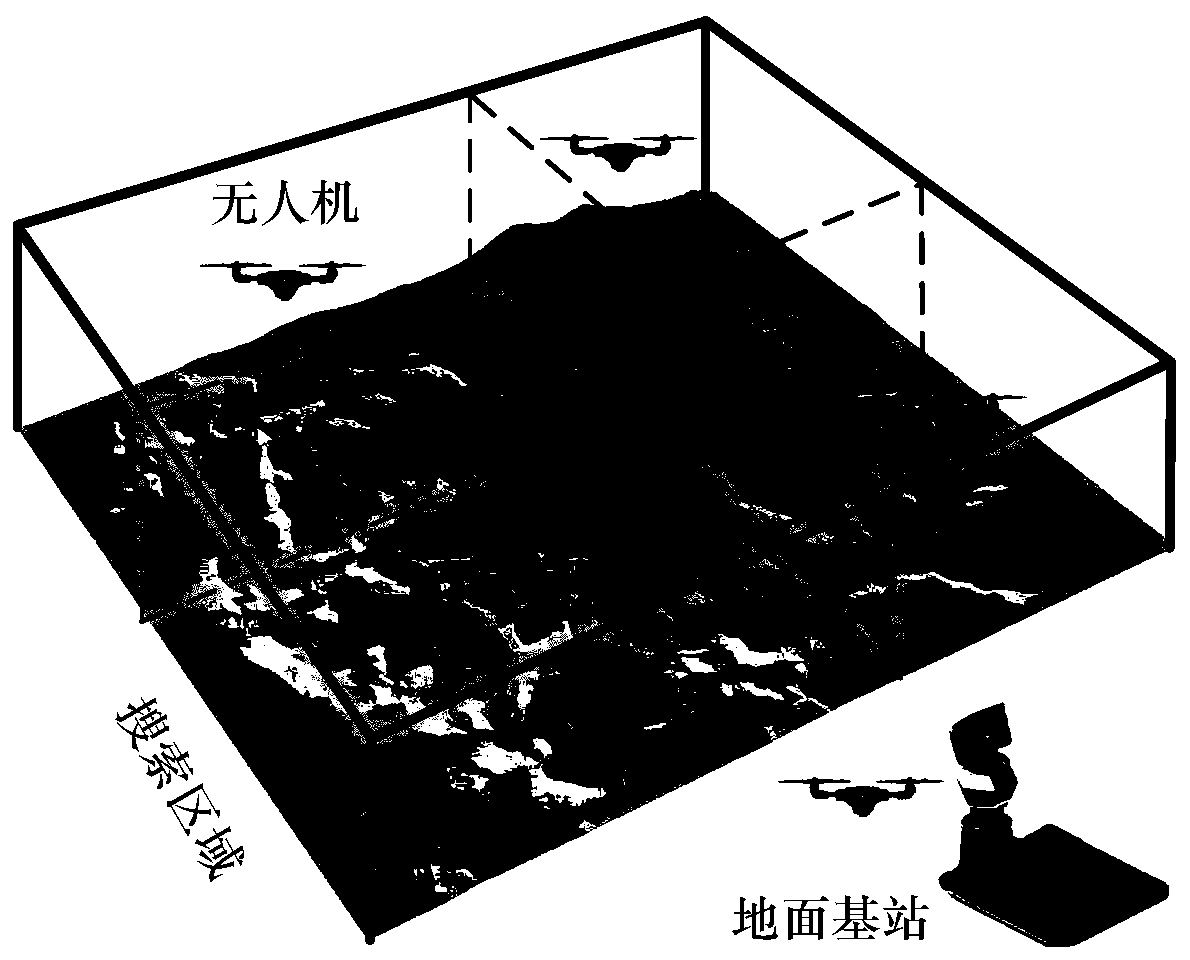
[0045] (1) Obtain the remaining energy of the UAV when it flies from the base station to the corresponding preset search sub-area;
[0046] (2) Redistribute the search area based on the remaining energy of the UAV to obtain a new search sub-area corresponding to the UAV;
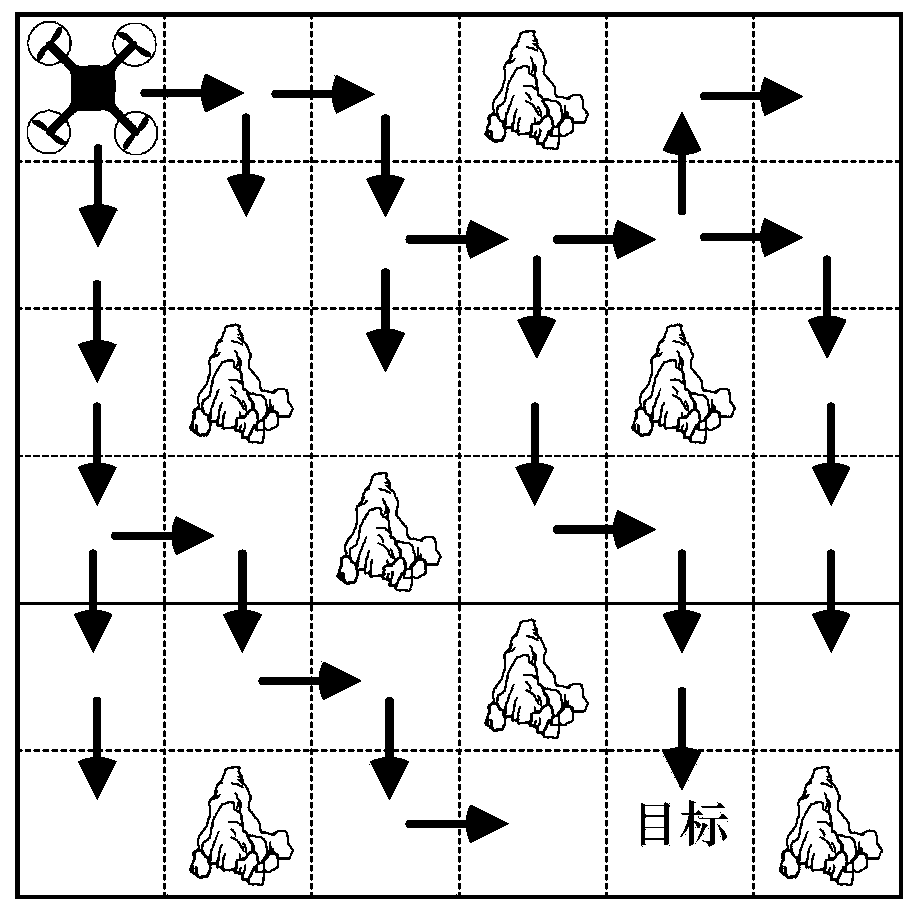
[0047] (3) Carry out the path planning of the UAV in the new search sub-area to obtain a continuous search path;
[0048] (4) When the UAV performs the search task according to the continuous search path, the remaining energy is not enough to supply it to continue the search until it returns to the base station, then switch tasks with the neighbor UAV until the search of the entire search area is completed.
[0049] In a specific implementation of the embodiment of the present invention, the remaining energy of the unmanned aerial vehicle when flying f...
Embodiment 2
[0067] The difference between the embodiment of the present invention and embodiment 1 is that the method further includes:
[0068] After all the UAVs complete the search tasks in the entire search area, the formation returns to the base station, which specifically includes the following steps: the i-th UAV Q i At time t the position is Q i (t);
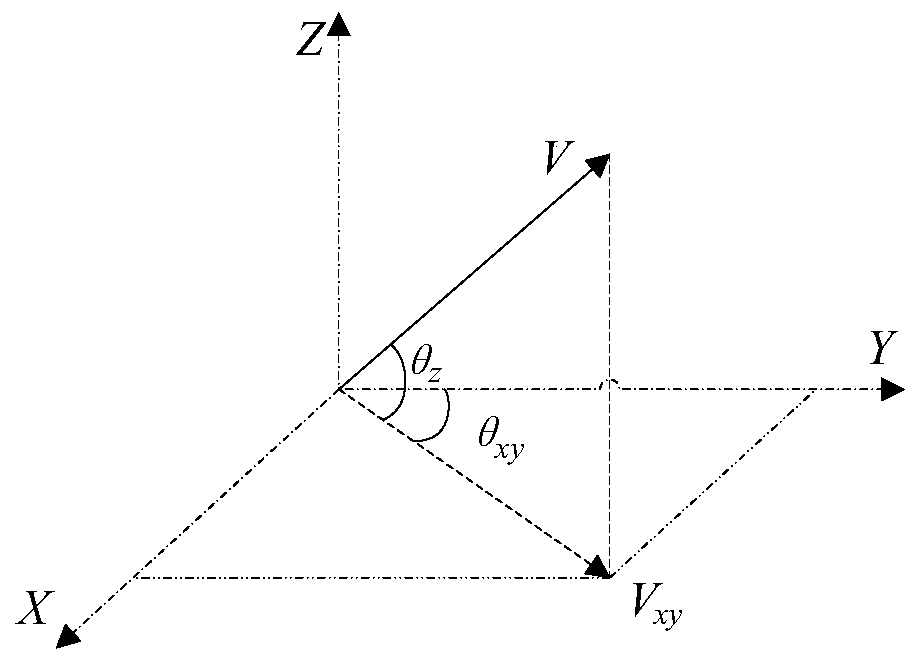
[0069] When Q j (t) when close to Q i (t) corresponds to the Euclidean distance d||Q j (t)-Q i (t)||i The direction of motion at time t+1 is Q k The velocity at time t is v k (t), the drone Q will be activated when there are no other drones within the minimum distance ε k And drone Q i The direction of motion at time t+1 is When drone Q i When there are no other drones within the detection range of , Q i Move in the original direction, Q i The direction of motion at the next moment is A i (t+Δt)=v i (t).
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More