

Point cloud registration method based on shape constraint
A point cloud registration and point cloud technology, applied in the field of three-dimensional reconstruction, can solve the problems of inaccurate, lack, and no matching of corresponding points, and achieve the effects of strong feature dependence, accurate transformation matrix, and poor algorithm robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
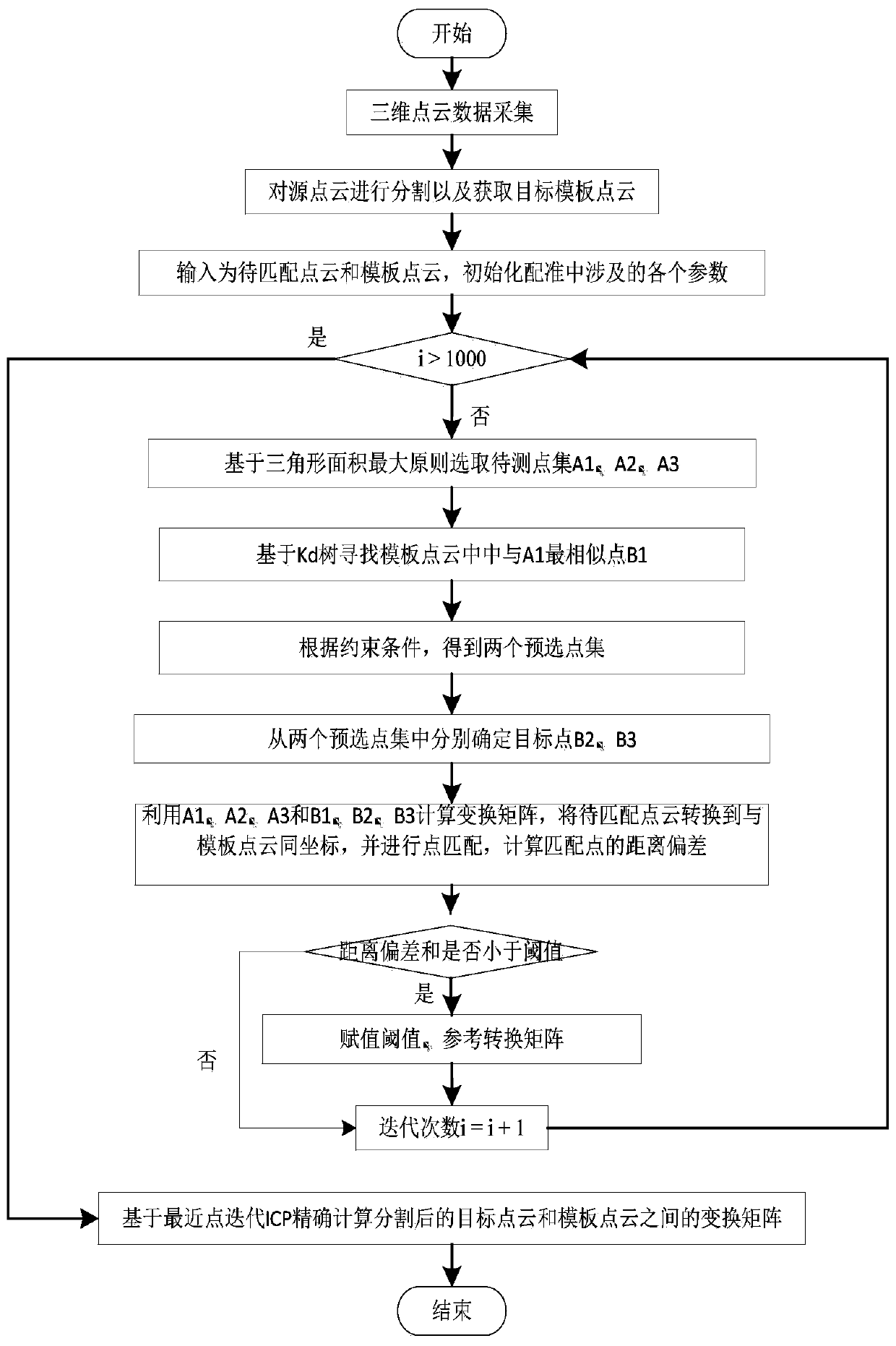
[0036] A method for point cloud registration based on shape constraints, comprising the following steps:
[0037] 1) Use the surface space point cloud information of the workpiece to be measured obtained by the scanning device as the source point cloud; the point cloud information in the CAD model of the workpiece to be measured as the template point cloud;
[0038] Load the source point cloud and the template point cloud, perform European clustering and segmentation on the source point cloud, and obtain multiple types of point clouds. Point clouds of the same type have similar characteristics, and register each type of point cloud separately; remember the current needs One type of point cloud for registration is the point cloud to be matched.
[0039] Obtain the FPFH feature descriptor of each point in the point cloud to be matched and the template point cloud respectively; the feature descriptor contains the three-dimensional coordinates and normal vector data of each point;...
Embodiment 2
[0060] A method for point cloud registration based on shape constraints, comprising the following steps:
[0061] 1) Use the surface space point cloud information of the workpiece to be measured obtained by the scanning device as the source point cloud; the point cloud information in the CAD model of the workpiece to be measured as the template point cloud;
[0062] Load the source point cloud and the template point cloud, perform European clustering and segmentation on the source point cloud, and obtain multiple types of point clouds. Point clouds of the same type have similar characteristics, and register each type of point cloud separately; remember the current needs One type of point cloud for registration is the point cloud to be matched.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More