

Low-speed torque motor with self-locking torque applicable to aerospace equipment
A technology of aerospace equipment and torque motors, applied in the field of torque motors, to meet the needs of driving and self-locking, easy installation, and small installation space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
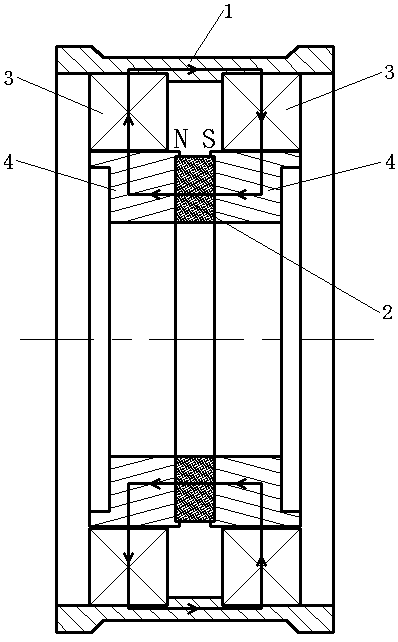
[0014] Specific implementation mode one: as figure 1 As shown, this embodiment describes a low-speed torque motor with self-locking torque suitable for aerospace equipment, including a casing 1, a magnetic steel 2, two sections of stator core 3, two sections of rotor core 4 and two sets of three-phase windings The two sections of rotor cores 4 are arranged coaxially (that is, they are arranged facing axially), the two sections of rotor cores 4 are provided with magnetic steel 2, and the outside of each section of rotor cores 4 is fitted with a stator core 3, The two sections of stator cores 3 are arranged coaxially (that is, they are arranged opposite to each other in the axial direction), and the two sections of stator cores 3 are connected by a magnetically permeable material (the purpose is to form a closed magnetic circuit), and each section of the stator core 3 Several large teeth and several small teeth are evenly distributed on the inner circumference of the inner circu...
specific Embodiment approach 2
[0015] Specific implementation mode two: as figure 1 As shown, this embodiment is a further description of specific embodiment 1. In order to meet the special environment of aerospace, the air gap between each stator core 3 and the corresponding rotor core 4 is 0.3~0.5mm (while the common The air gap between the stator and rotor iron cores of stepping motors is 0.03 ~ 0.05mm.Common stepping motors all try to design the positioning torque as small as possible in order to improve performance, and the present invention increases the positioning torque, Bigger is better, which is the complete opposite of design philosophy).
specific Embodiment approach 3
[0016] Specific implementation mode three: as figure 1 As shown, this embodiment is a further description of specific embodiment 1 or 2. The number of small teeth uniformly distributed on the inner peripheral surface of the stator core 3 and the uniformly distributed small teeth on the outer peripheral surface of the rotor core 4 The slot widths of several small teeth are larger than the tooth width of the small teeth (in order to maximize the no-load positioning torque of the motor).
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More