

Golf robot control system based on uwb positioning and navigation
A golf ball, positioning and navigation technology, applied in the field of robotics, can solve the problems of golf course site damage, waste of manpower and material resources, low ball picking efficiency, etc., to achieve the effect of reducing manpower and material resources, avoiding waste of electricity, and enhancing diversity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
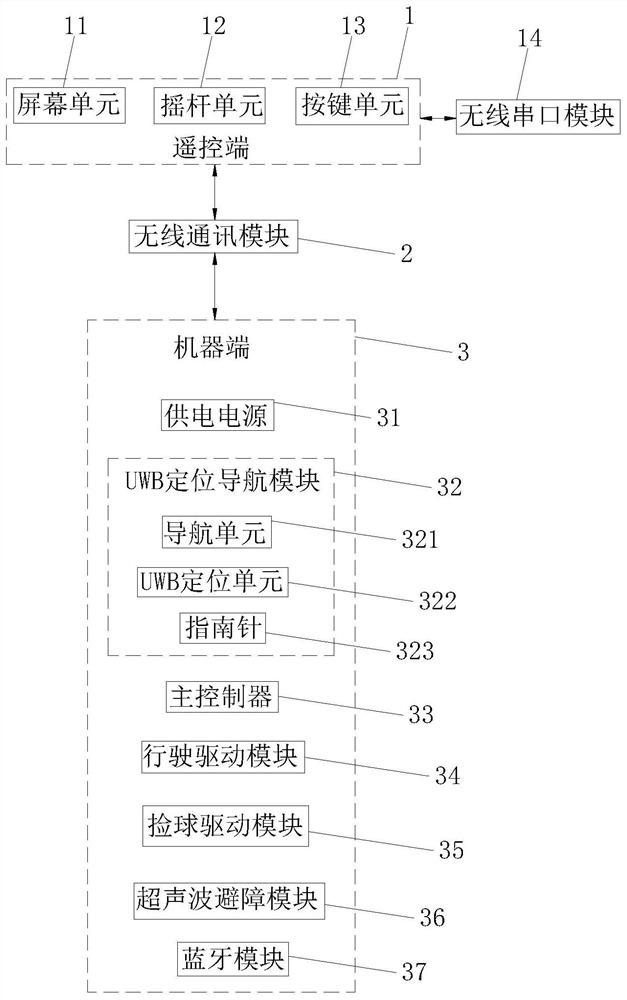
[0045] Embodiment: the golf robot control system based on UWB positioning navigation, as figure 1 As shown, it includes the machine terminal 3 , the wireless communication module 2 , the remote control terminal 1 and two base stations, and the two-way data transmission is realized between the machine terminal 3 and the remote control terminal 1 through the wireless communication module 2 communication connection.
[0046] Such as figure 1 As shown, the machine end 3 includes a machine body, a power supply 31 , a UWB positioning and navigation module 32 , a main controller 33 , a traveling driving module 34 and a ball picking driving module 35 . Wherein, the power supply 31 is used to supply power to the control system. The UWB positioning and navigation module 32 includes a navigation unit 321 , a UWB positioning unit 322 and a compass 323 . The navigation unit 321 is used for storing or receiving navigation data of the body. The UWB positioning unit 322 is used to measure th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More