

Six-rod stretching and drawing overall robot
A kind of overall tension and robot technology, applied in manipulators, motor vehicles, program-controlled manipulators, etc., can solve the problems of complex structure and difficult deformation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
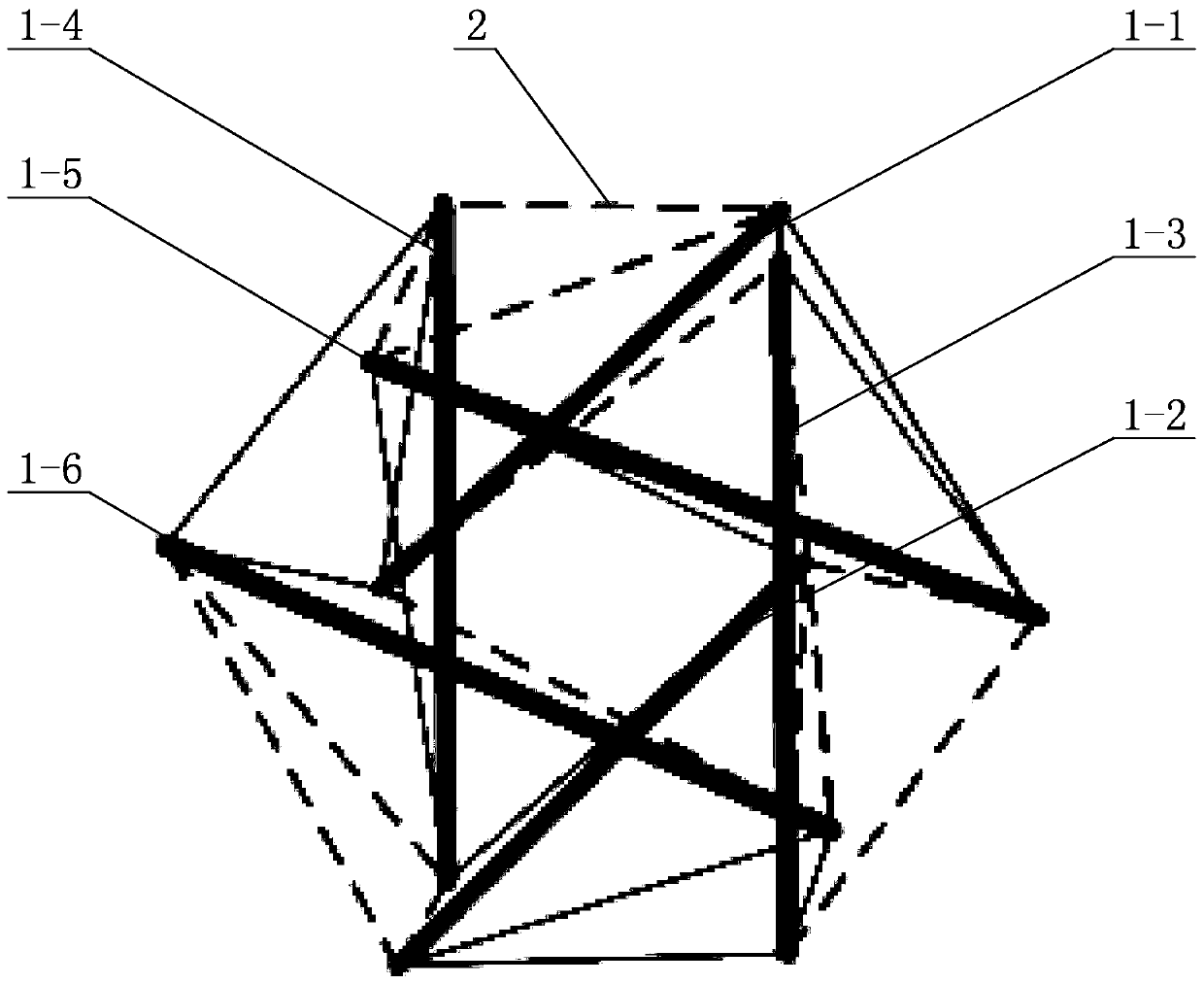
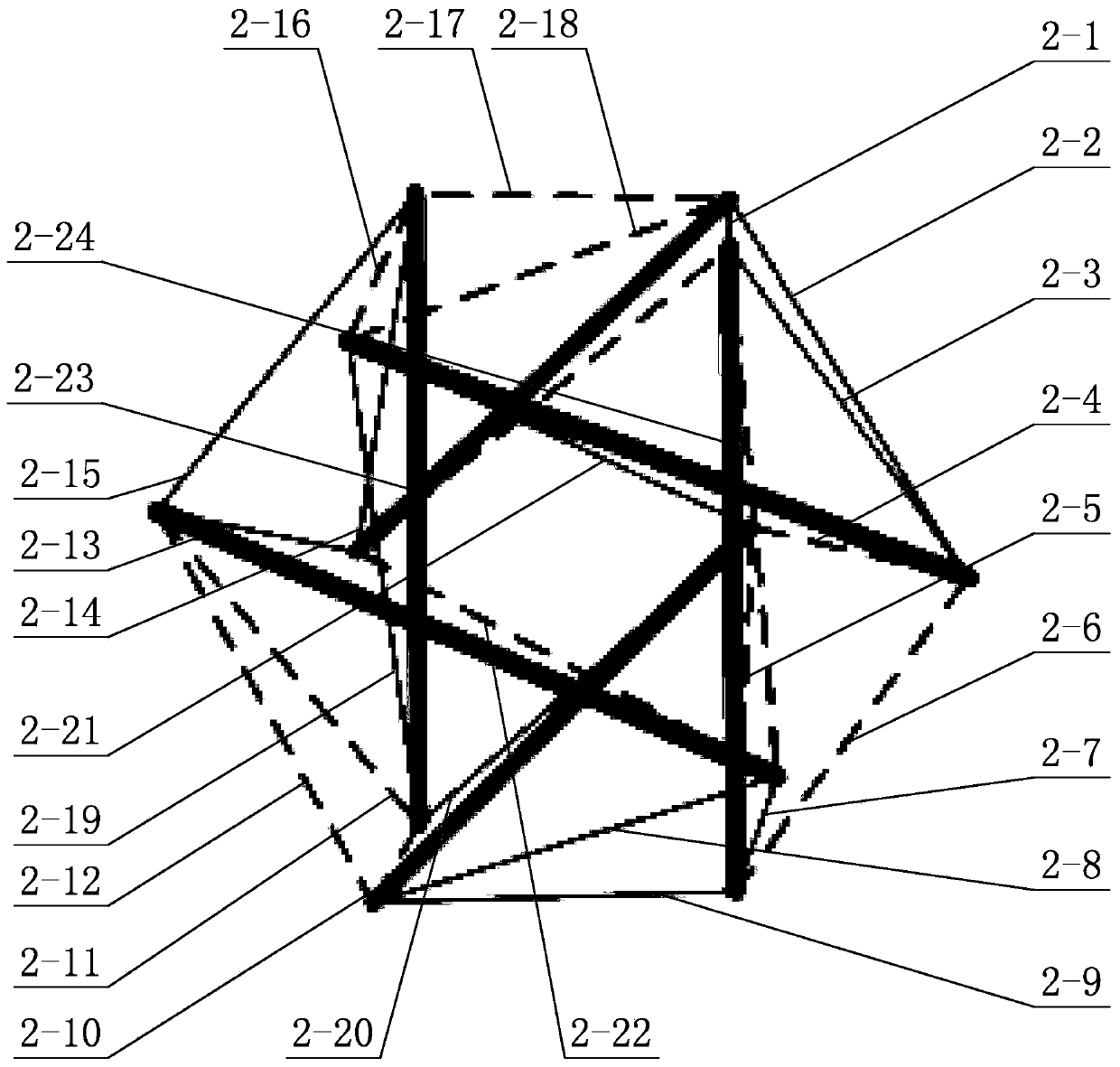
[0027] Specific implementation mode one: combine Figure 1 to Figure 7 Describe this embodiment, a six-bar tensioned integral robot of this embodiment, it includes 6 rigid rods 1 and 24 flexible ropes 2, and the 6 rigid rods 1 and 24 flexible ropes 2 form a class Icosahedral tensegrity structure;
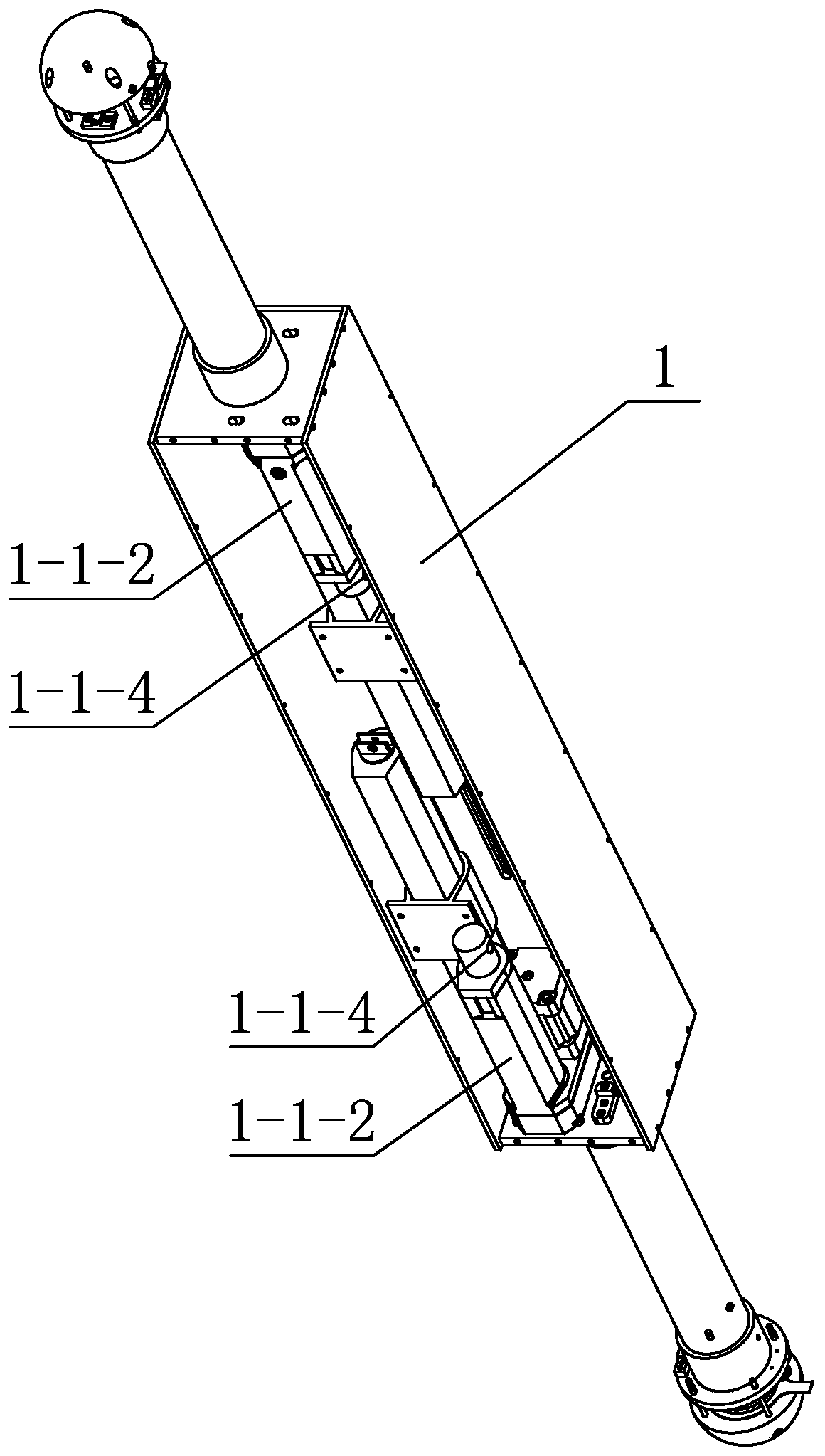
[0028] The structure of the six rigid rods 1 is the same, each rigid rod 1 includes a central assembly and two end assemblies, and the two end assemblies are symmetrically arranged at the left and right ends of the central assembly, and the central assembly includes a box body 1-1- 1 and 2 drive units, the box 1-1-1 is a closed cuboid structure, the 2 drive units are set inside the box 1-1-1, and the 2 drive units are respectively located in the box 1-1-1 left and right ends;
[0029]The six rigid rods 1 are respectively the first rod 1-1, the second rod 1-2, the third rod 1-3, the fourth rod 1-4, the fifth rod 1-5 and the sixth rod The rods 1-6, the first rod 1-1 and the second ...
specific Embodiment approach 2
[0040] Specific implementation mode two: combination Figure 4 To illustrate this embodiment, the box body 1-1-1 of this embodiment includes 6 connecting plates, and the 6 connecting plates are respectively 2 front and rear connecting plates 1-1-1-1, and 2 left and right connecting plates 1-1- 1-2 and 2 upper and lower connecting plates 1-1-1-3, 2 front and rear connecting plates 1-1-1-1 are located at the front and rear ends of the box body 1-1-1, 2 left and right connecting plates 1-1 -1-2 is located at the left and right ends of the box body 1-1-1, and the two upper and lower connecting plates 1-1-1-3 are located at the upper and lower ends of the box body 1-1-1. So arranged, 6 connecting plates are bolted together to form the outer surface of the closed central assembly. Other compositions and connections are the same as in the first embodiment.
specific Embodiment approach 3
[0041] Specific implementation mode three: combination image 3 and Figure 4 Describe this embodiment, the two driving units of this embodiment are respectively installed on the inner end faces of two upper and lower connecting plates 1-1-1-3, and each driving unit includes an electric push rod 1-1-2, a push rod bracket 1-1-3 and the rope connection clamp 1-1-4, the motor bottom of the electric push rod 1-1-2 is installed on the inner end face of the left and right connecting plates 1-1-1-2, the push rod bracket 1-1 -3 is installed on the adjacent upper and lower connecting plates 1-1-1-3, the electric push rod 1-1-2 is fixed on the push rod bracket 1-1-3, and the rope connection clamp 1-1-4 is set on The end of the piston rod of the electric push rod 1-1-2. Other compositions and connections are the same as those in Embodiment 1 or Embodiment 2.
[0042] The manufacturer and model of the electric push rod 1-1-2 of the present embodiment are Longxiang (hardware), and the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More