

On-orbit calibration method
A calibration method and attitude adjustment technology, applied in the aerospace field, can solve problems such as reducing navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
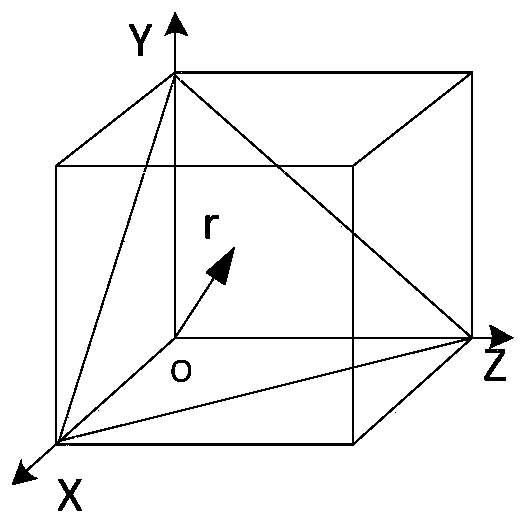
[0065] An on-orbit calibration method based on satellite navigation and star sensor information fusion with redundant inertial groups for aircraft, using optical fiber four-axis redundant inertial groups, specifically: it consists of four gyroscopes and four accelerometers, three of which are Orthogonal installation with three accelerometers is the orthogonal axis (X-axis, Y-axis and Z-axis), and another gyroscope and accelerometer are installed obliquely, which is the redundant axis (r-axis), such as figure 1 shown. The included angle between the redundant axis and the other three axes is the same, 54.74°. The star sensor is installed in strapdown with the redundant inertial group, and the optical axis of the star sensor is in the same direction as the Y-axis of the redundant inertial group. Define OXYZ as the system of the inertial group, denoted as b system. The four-axis redundant inertial group must be calibrated before use to compensate for sensor errors. In general, ...
Embodiment 2
[0129] The only difference between this embodiment and Embodiment 1 is that when adjusting the posture, first rotate 45° around the Z axis, then rotate 45° around the X axis, and finally rotate 45° around the Y axis; when resetting, first rotate -45° around the Y axis °, then rotate -45° around the X axis, and finally rotate -45° around the Z axis.
[0130] All the observable error items of the four-axis redundancy inertial group in this embodiment can be estimated at one time; the size of the calibration value is greater than more than 90% of the constant value error item, and the calibration result is correct. Calibration method of observation error term.
Embodiment 3
[0132] The only difference between this embodiment and Embodiment 1 is that when adjusting the posture, first rotate 15° around the Z axis, then rotate 15° around the X axis, and finally rotate 15° around the Y axis; when resetting, first rotate -15° around the Y axis °, then rotate -15° around the X axis, and finally -15° around the Z axis.
[0133] All the observable error items of the four-axis redundancy inertial group in this embodiment can be estimated at one time; the size of the calibration value is greater than more than 90% of the constant value error item, and the calibration result is correct. Calibration method of observation error term.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More