

Detection method and system, based on laser radar and binocular camera, for pedestrian in front of vehicle
A technology of laser radar and binocular camera, which is applied to computer components, character and pattern recognition, instruments, etc., can solve the problems of inability to satisfy the integrity and reliability of information perception, limited amount of radar information, and inaccurate detection results, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
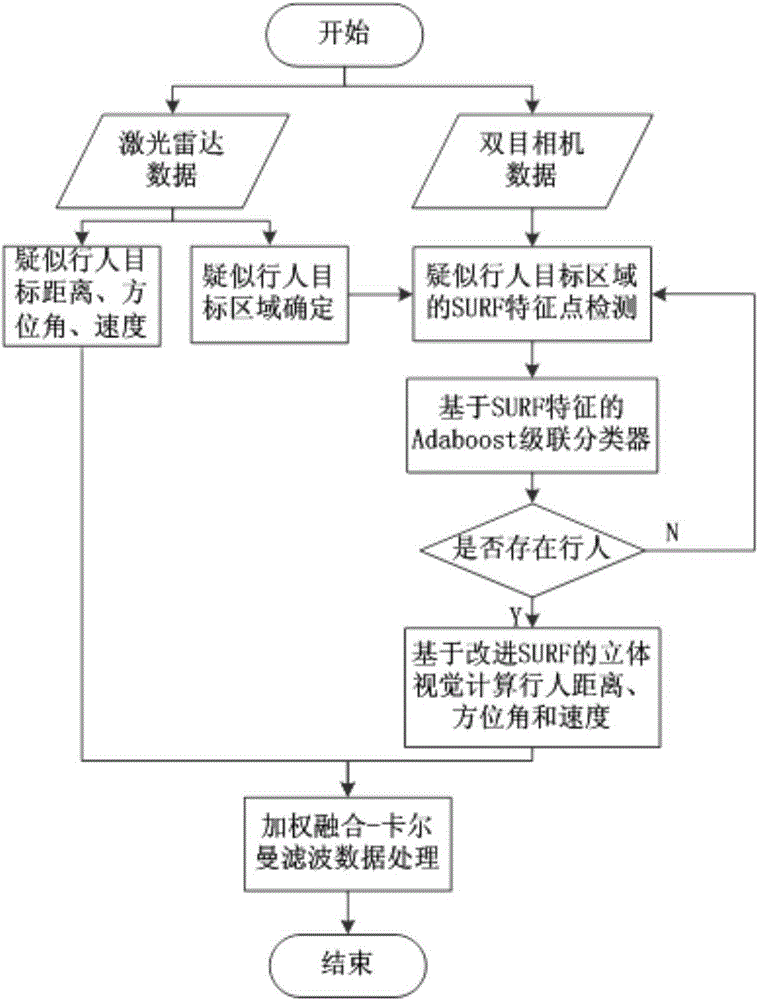
Method used
Image

Examples
Embodiment
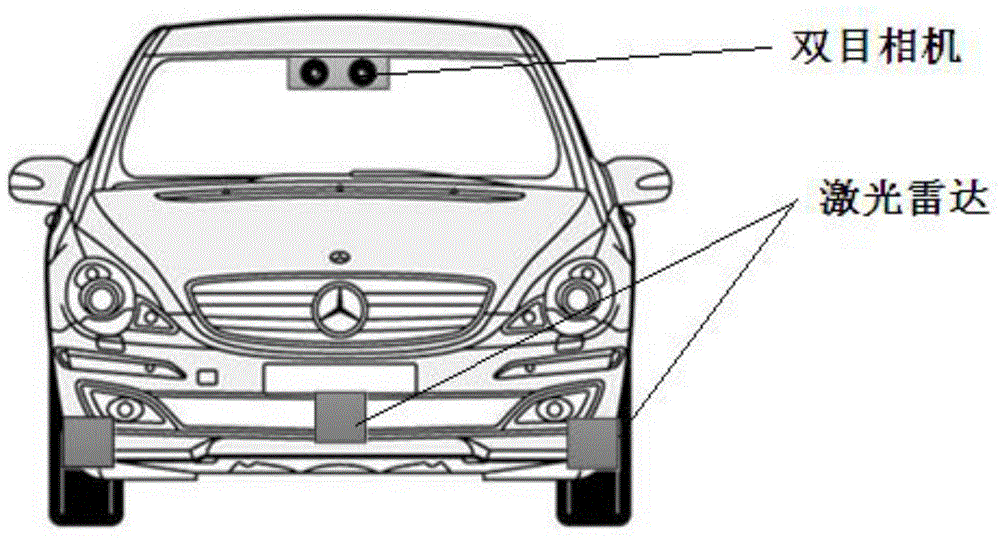
[0109] In the method for detecting pedestrians in front of a vehicle with a laser radar and a binocular camera in this embodiment, the data acquisition device used includes two LMS111 laser radars installed at two places in front of the vehicle, an LMS511 laser radar installed in the middle of the front of the vehicle, and a The Bumblebee2 stereo camera in the middle of the back of the interior rearview mirror, a gigabit network switch connected to three lidars and cameras, a server connected to the gigabit network switch, a generator and a UPS. Among them, the laser scanning plane of the LMS511 long-distance lidar is parallel to the plane of the vehicle base, the laser scanning plane of the LMS111 short-distance radar on the left is obliquely downward by 8°, and the laser scanning plane of the LMS111 short-distance radar on the right is obliquely upward by 8°. The field of view of the binocular camera can cover the lateral 66° range in front of the vehicle to meet the needs of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More