

Accurate positioning method for edgewise cleaning by unmanned cleaning vehicle
A precise positioning and vehicle technology, applied in navigation, instrumentation, surveying and navigation, etc., can solve the problems that the detection effect cannot meet the practical requirements, consume large computing resources, and require very high map accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
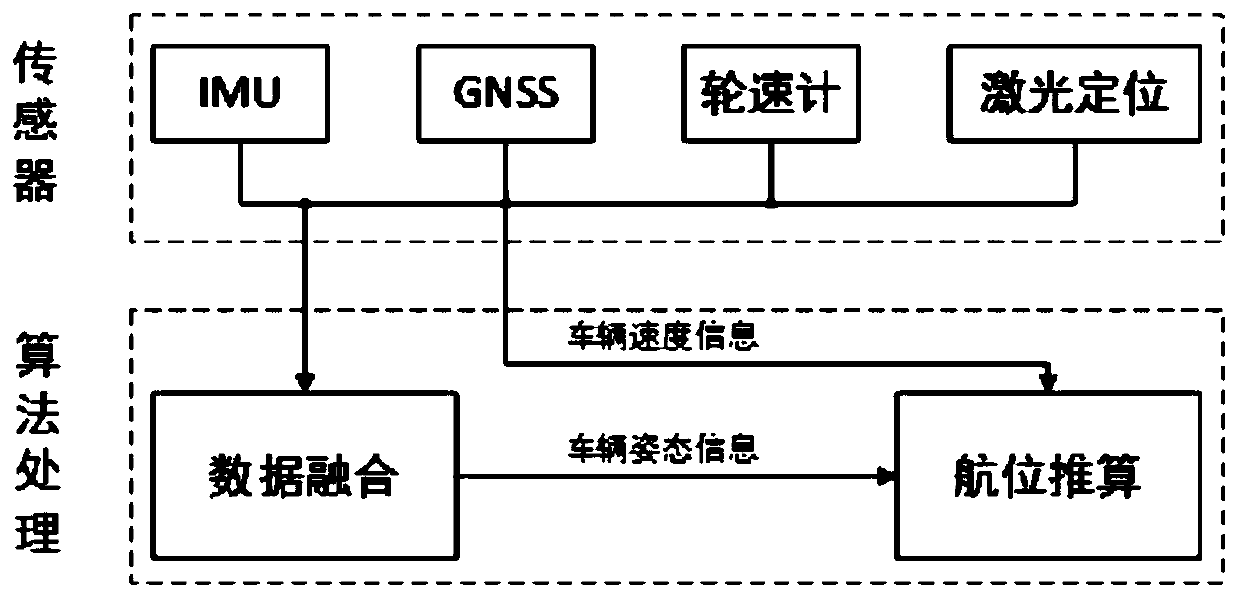
[0054] An accurate positioning method provided by the embodiment of the present invention is applied to unmanned vehicles, preferably in low-speed unmanned sweeping vehicles, such as figure 1 As shown, this method includes two parts of data fusion and dead reckoning, in which data fusion obtains the current accurate attitude information of the vehicle, and dead reckoning obtains the current accurate, smooth and reliable positioning data of the vehicle based on the current attitude information of the vehicle and wheel speed data .
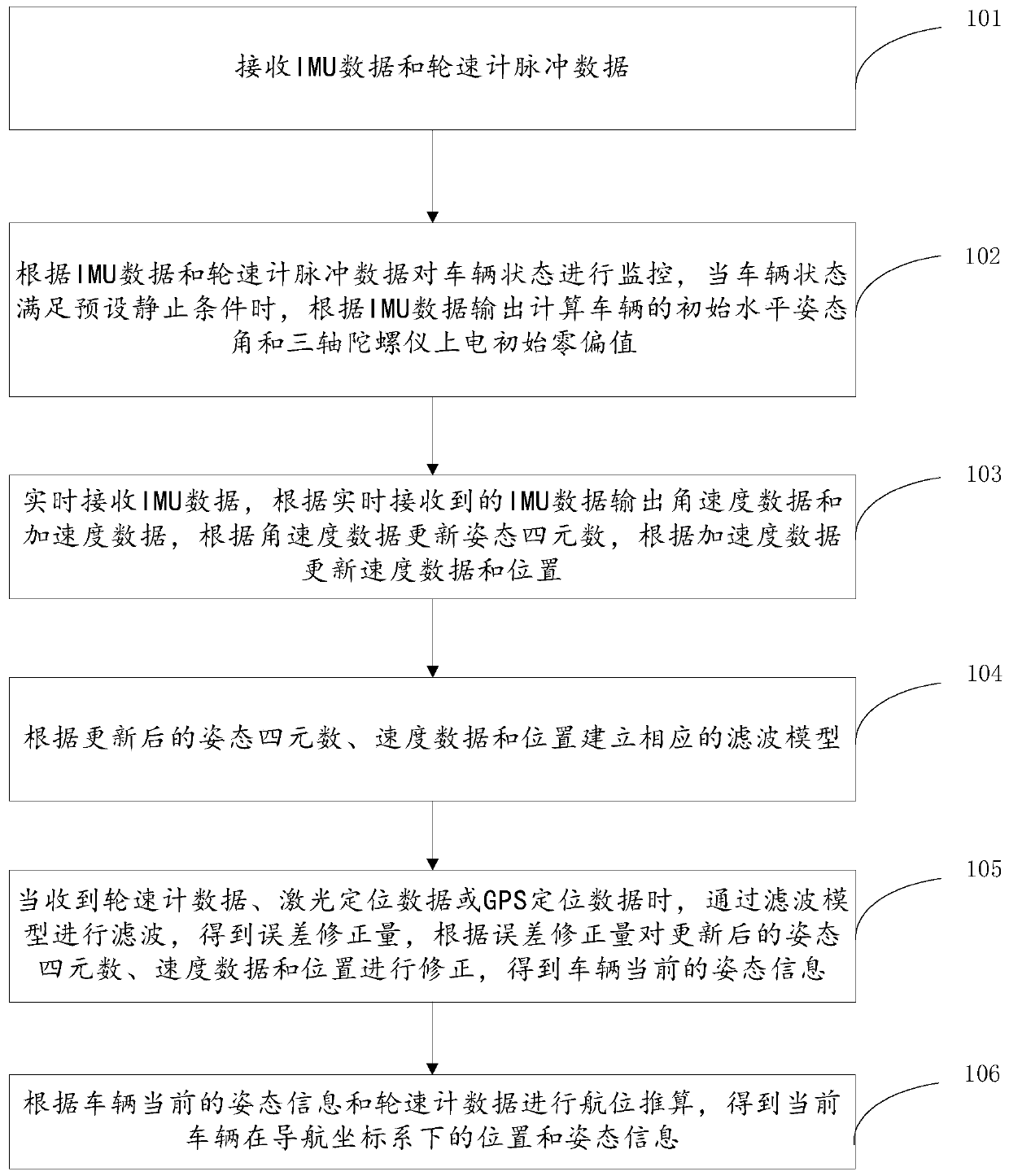
[0055] figure 2 A flow chart of an accurate positioning method for unmanned cleaning vehicles for side cleaning provided by an embodiment of the present invention, as shown in figure 2 shown, including:
[0056] Step 101, receiving IMU data and wheel speedometer pulse data.
[0057] Da...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More