Target positioning device and method for following robot
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A technology for following robots and target positioning, which is applied in the field of target positioning devices for following robots, which can solve the problems of poor interaction friendliness and large color contrast, achieve good environmental adaptability, and realize the effect of multi-target recognition
Active Publication Date: 2020-12-11
北京华信有道科技有限公司
View PDF11 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
The inventor found that the feature selection method listed is a common method in the field of robotics, and requires wearing on a solid surface, which makes the color contrast between the target and the surrounding environment large, and the interaction friendliness becomes poor.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
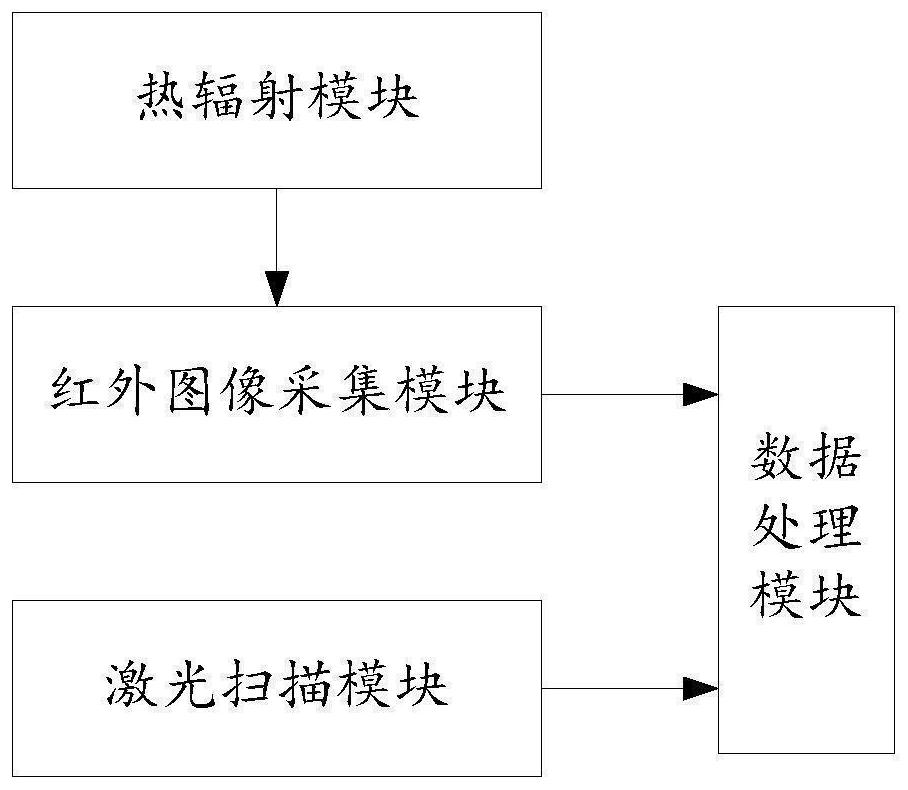
[0044] figure 1 It is a schematic structural diagram of a target positioning device for a following robot according to an embodiment of the present disclosure.
[0045] Such as figure 1 As shown, a target positioning device for following a robot in this embodiment includes:
[0046] a heat radiation module, which is used to generate heat radiation;
[0047] An infrared image acquisition module, which is used to collect infrared images generated by thermal radiation;
[0048] Laser scanning module, which is used to collect scene depth point cloud data;
[0049] The data processing module is connected to the infrared image acquisition module and the laser scanning module respectively, and is used to receive the infrared image generated by thermal radiation and the depth point cloud data of the scene, and to locate the target.
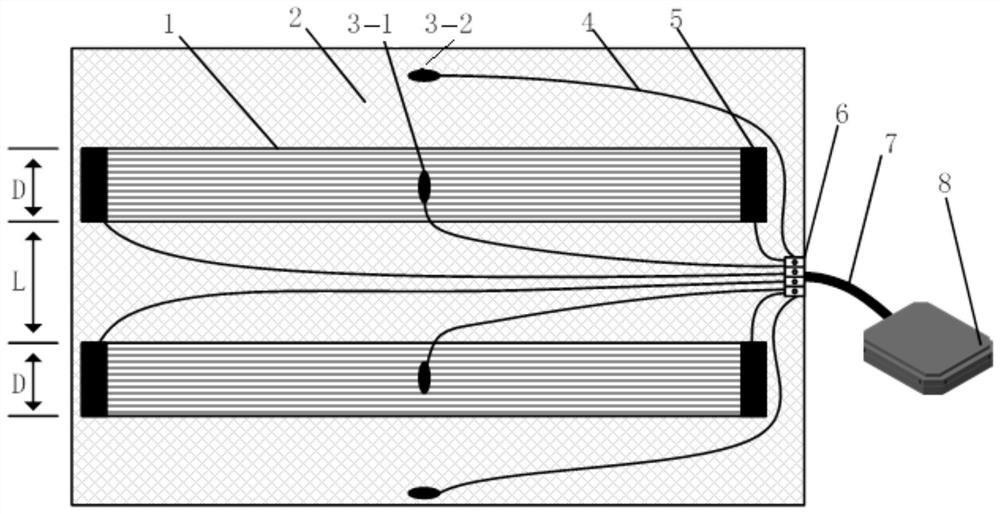
[0050] Wherein, in the embodiment of the present disclosure, all heating strips are in a heating state.
[0051] Compared with other video images, i...
Embodiment 2
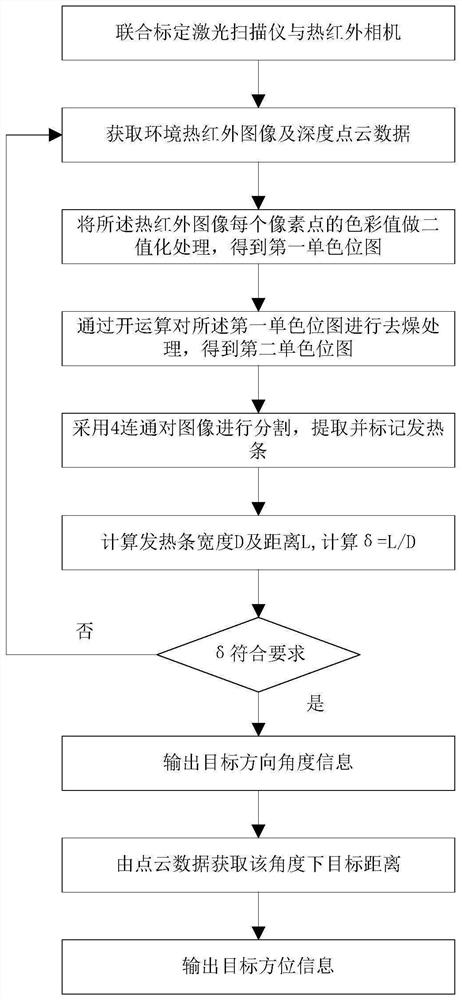
[0094] The positioning method of the target positioning device following the robot in this embodiment includes:
[0095] Receive infrared images and scene depth point cloud data;
[0096] Detect the edge curve of the heating strip in the infrared image;
[0097] Among them, the process of detecting the edge curve of the heating strip in the infrared image is:
[0098] Binarize the gray value of each pixel in the infrared image to obtain the first unit color bitmap;
[0099] performing denoising processing on the first unit color bitmap to obtain a second unit color bitmap;
[0100] The color bitmap of the second unit is segmented by multi-connection method to obtain the edge curve of the heating strip.
[0101] Calculate the average value of all pixel coordinates on the edge curve of the heating strip to obtain the center coordinate of the heating strip, and then obtain the width of the heating strip and the distance between the heating strips;
[0102] Use the ratio of th...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention provides a target positioning device and method for follow robots. The target positioning device for the follow robots comprises a thermal radiation module, an infrared image acquisitionmodule, a laser scanning module and a data processing module, wherein the thermal radiation module is arranged on a target; the data processing module is used for detecting edge curves of heating strips in an infrared image, solving an average value of all the pixel coordinate values on the edge curves of the heating strips so as to obtain center coordinates of the heating strips and then obtainheating strip widths and heating strip distances; when the thermal radiation module is searched, calculating an average value of center point coordinates of all the heating strips and taking the average value as an image coordinate of the target so as to solve direction information of the target under the infrared image; mapping field scene deep point cloud data to the infrared image so as to obtain distance information corresponding to all the pixels of the infrared image; recognizing an overall profile of the target at a target direction of the infrared image; and carrying out statistical analysis on all the pieces of distance information corresponding to the pixels of the target and carrying out average value calculation to obtain a position of the target.
Description
technical field [0001] The present disclosure belongs to the technical field of robots, and in particular relates to a target positioning device and method for a following robot. Background technique [0002] The statements in this section merely provide background information related to the present disclosure and do not necessarily constitute prior art. [0003] Follow-the-walk is a typical man-machine cooperation mode, which enables the robot to follow the movement of people in factories, large supermarkets, warehouse logistics and other environments, and cooperate with humans to complete tasks such as material transportation, obstacle removal, and emergency rescue. Following the technological development of robots and relying on the support of human target recognition technology, the common human target recognition methods are mainly two recognition methods based on visual information or laser information. When the robot is following along in a complex environment, the v...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More