Industrial robot collision detection method based on energy deviation observer
An industrial robot and energy deviation technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as increasing the cost of robots and increasing the complexity of control systems, and achieve the effects of ensuring safety, reducing complexity, and reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
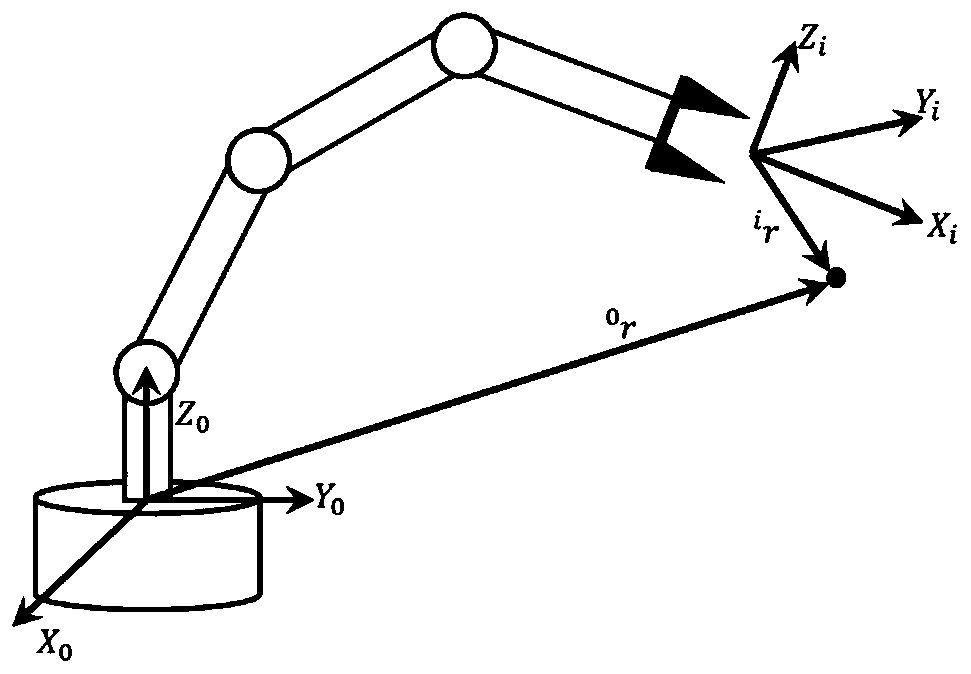
[0103] S1. In this embodiment, the ER30 model industrial robot of Estun Robot Engineering Co., Ltd. is used for detailed description. First, combine the specific DH parameters of the ER30 industrial robot to calculate the energy of each joint of the robot:
[0104]
[0105] The DH parameters of the ER30 industrial robot are as follows:
[0106]
[0107]
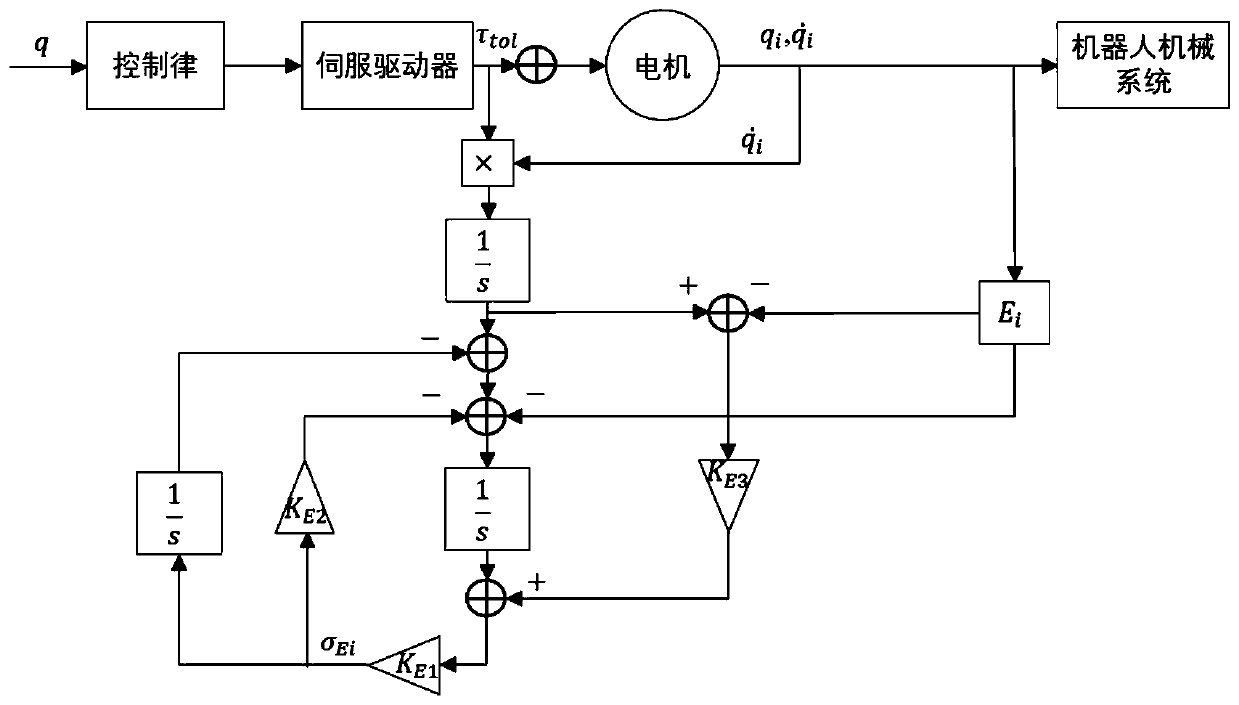
[0108] S2. Design an energy deviation observer.
[0109] First, define the collision detection operator σ at the joint i of the ER30 industrial robot Ei :
[0110]
[0111] Where: τ ei is the collision torque caused by the collision at joint i; σ Ei for observation value; K E1 >0,K E2 >0 is the gain; τ tol is the output torque output by the motor at joint i of the robot after the collision occurs.
[0112] Secondly, design the collision detection algorithm adjustment function of ER30 industrial robot as:
[0113]
[0114] Using the adjustment function as the feed-forward adjustment of the ER30 indust...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com