

Wharf environment based driving track generation system and method
A driving trajectory and trajectory generation technology, applied in the direction of external condition input parameters, control devices, transportation and packaging, etc., can solve the problems of poor flexibility and autonomy, achieve high flexibility, high stability, and simple implementation principles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0026] A driving trajectory generation system based on the wharf environment in this embodiment is applied to a driving trajectory generation system in closed and semi-closed scenes, and its composition includes:
[0027] The positioning module is used to provide the current stable and accurate pose, speed, and acceleration of the vehicle in real time through gps, imu, wheel encoders, etc.; gps is the global positioning system; imu is the inertial measurement device;
[0028] The perception module is used to provide real-time obstacle information through laser radar, camera, millimeter-wave radar, etc. The obstacle information includes the outer envelope of the obstacle outline, the obstacle travel speed and the obstacle travel direction;
[0029] The port dispatching module is used to issue the planning command of the global path reference line and target point information according to the planning scenario. The target point information includes the state information of the ve...
specific Embodiment approach 2
[0034] A driving trajectory generation system based on the wharf environment in this embodiment is applied to the driving trajectory generation system in closed and semi-closed scenes, as a subsystem of the entire automatic driving system, and its composition includes:
[0035] The trajectory generation system receives the instructions of the dispatching system, collects relevant information, and sends the generated running trajectory as an output to the execution system of the vehicle, finally guiding the vehicle to reach the predetermined location safely;
[0036] The trajectory generation system needs to receive the instructions issued by the dispatching system, generate the running trajectory from the starting point to the end point, and transmit the quality to the execution system, and go to the target location through the execution system;
[0037] The trajectory generation system includes a positioning module, a perception module, a map module, and a decision-making modu...
specific Embodiment approach 3
[0049] A method for generating a driving trajectory based on a wharf environment performed by the trajectory generation system according to the specific embodiment 1, the method includes the steps of sampling candidate trajectories, scoring the trajectory, and selecting the trajectory; wherein,
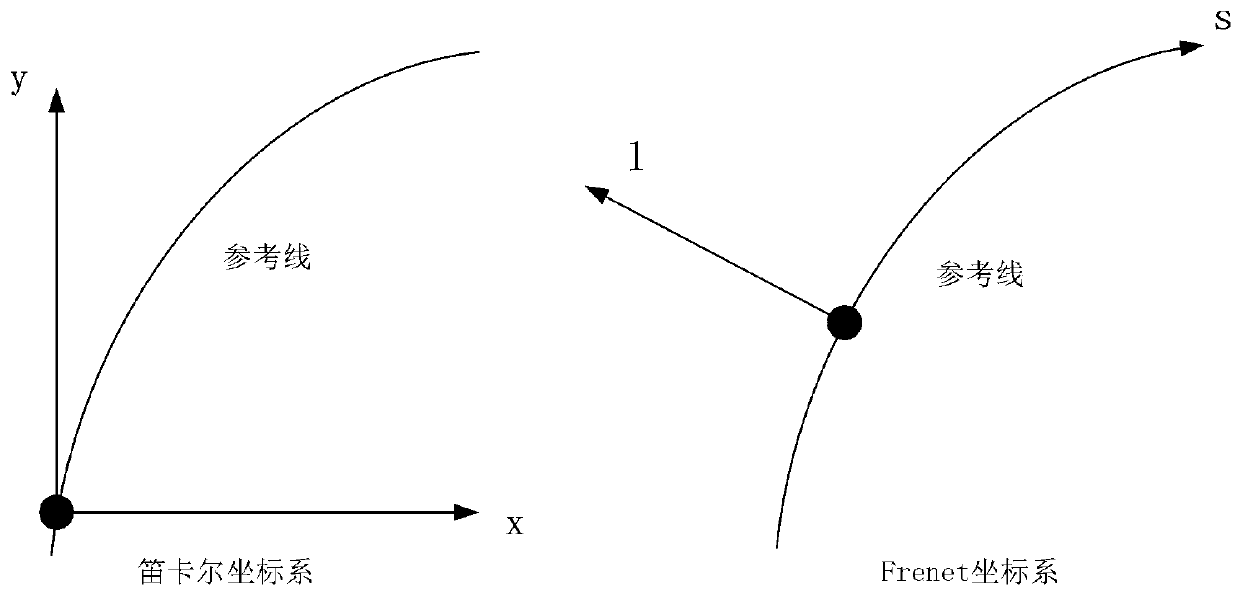
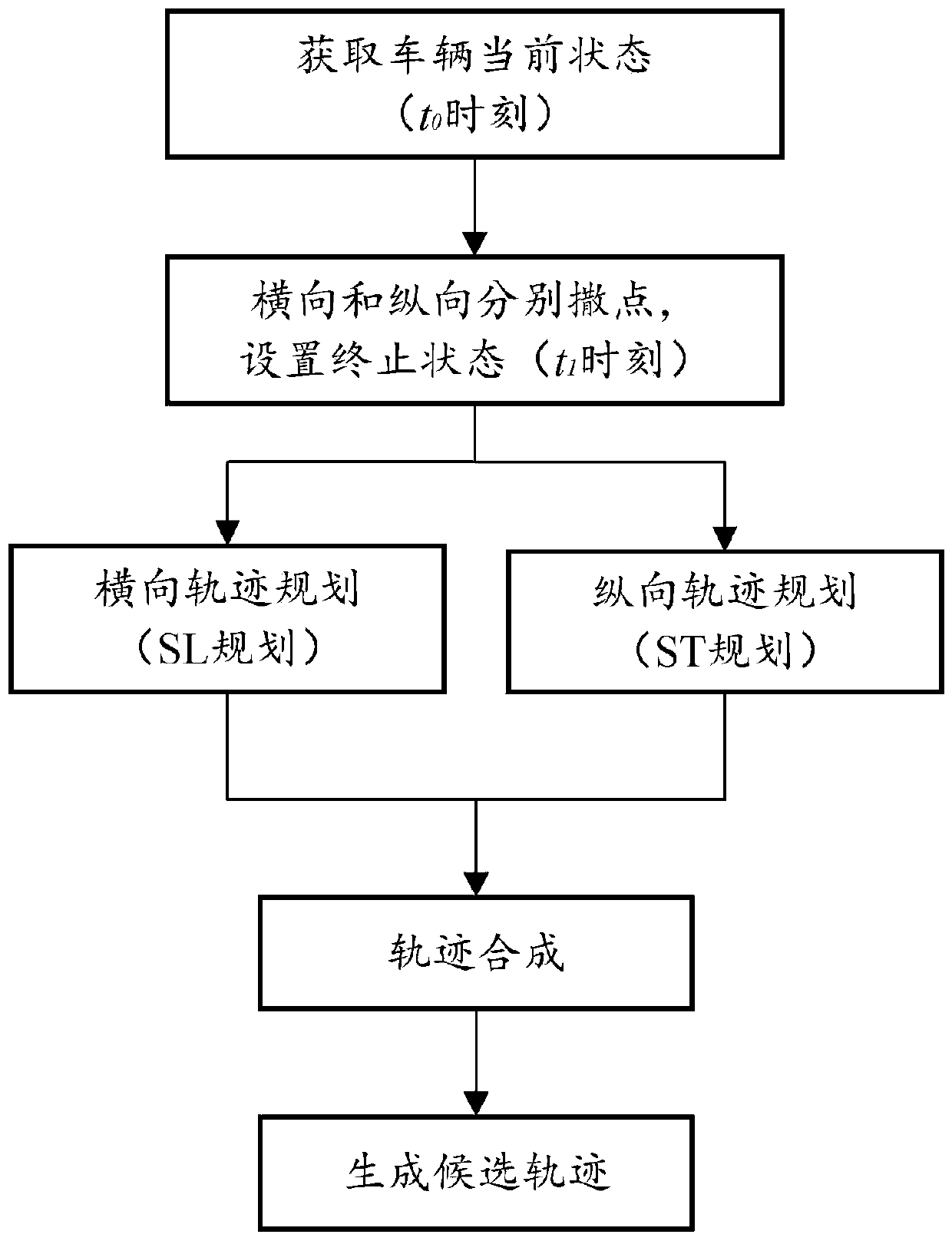
[0050] The step of sampling candidate trajectories is to generate driving trajectories according to the vehicle’s own position information provided by the positioning module and the road center reference line information provided by the map module, and uniformly scatter point samples at a certain density in the horizontal and vertical directions of the road center reference line , and fit the horizontal and vertical states through polynomials, and use polynomial equations to describe the driving trajectory of the vehicle position to each sampling point;
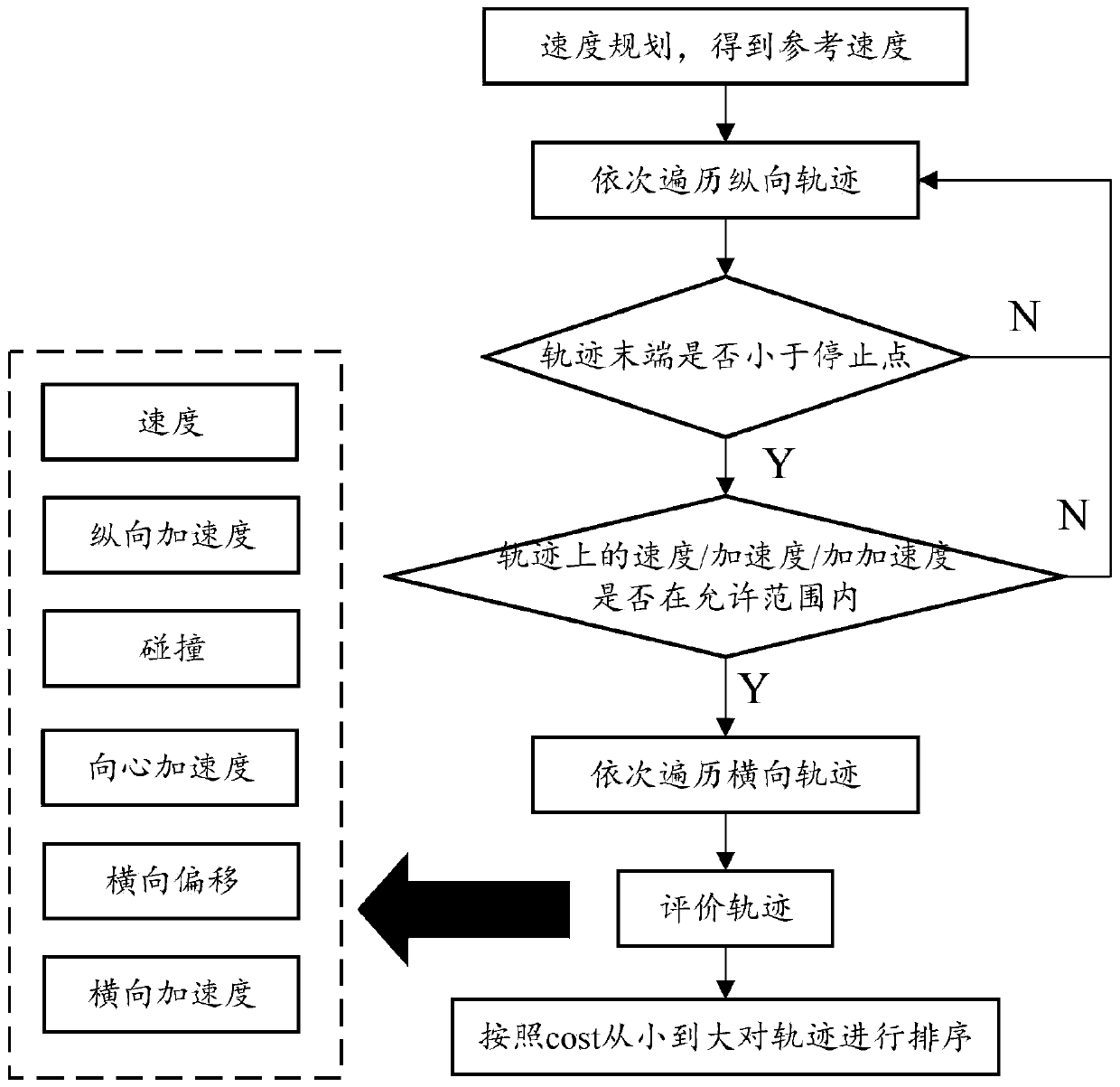
[0051] The steps of trajectory scoring are to score each driving trajectory according to the following 4 points, in order to facilit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More