

Unmanned ship autonomous navigation method based on deep reinforcement learning and genetic algorithm
A technology of reinforcement learning and genetic algorithm, applied in the field of autonomous navigation of unmanned ships, can solve the problems of reducing the flexibility and mobility of the control system, and achieve the effect of reducing real-time calculation, improving fault tolerance, and reducing calculation pressure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the technical solutions and advantages of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
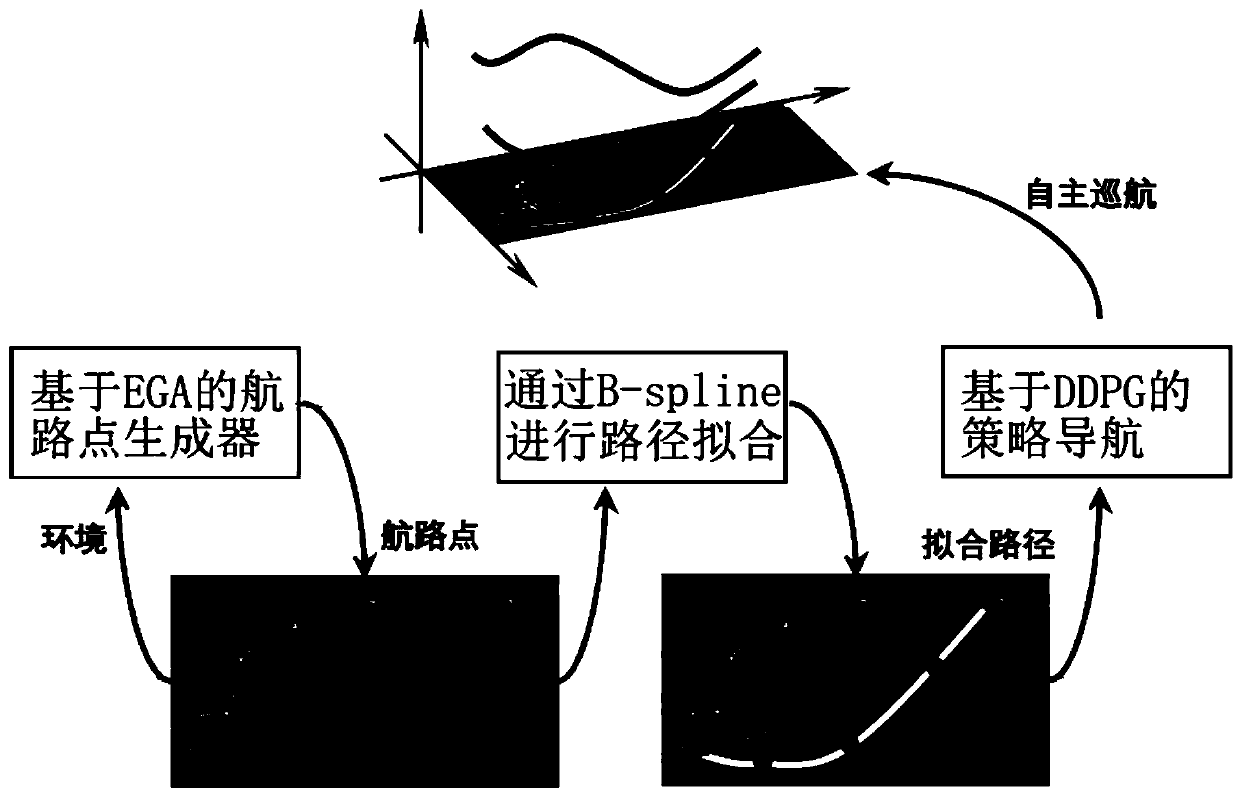
[0032] figure 1 It is a flow chart of the autonomous navigation system of unmanned ship based on deep reinforcement learning and genetic algorithm, the method of autonomous navigation of unmanned ship based on deep reinforcement learning and genetic algorithm, the autonomous navigation of unmanned ship includes path planning subsystem and path tracking control sub-system system; in the path planning subsystem, the satellite images are used to model and preprocess the environment, and then the elite-genetic algorithm (abbreviation: EGA) is used for offline training to obtain a suitable number of barrier-free waypoints from the start point to the end point; In the tracking control system, the tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More