

Walking device of inspection robot
A line inspection robot and walking device technology, which is applied in the field of line inspection robots, can solve the problems of insufficient stability in the walking process of the line inspection robot and poor adjustment of the walking part, so as to achieve the effect of improving walking stability and ensuring tight transmission
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
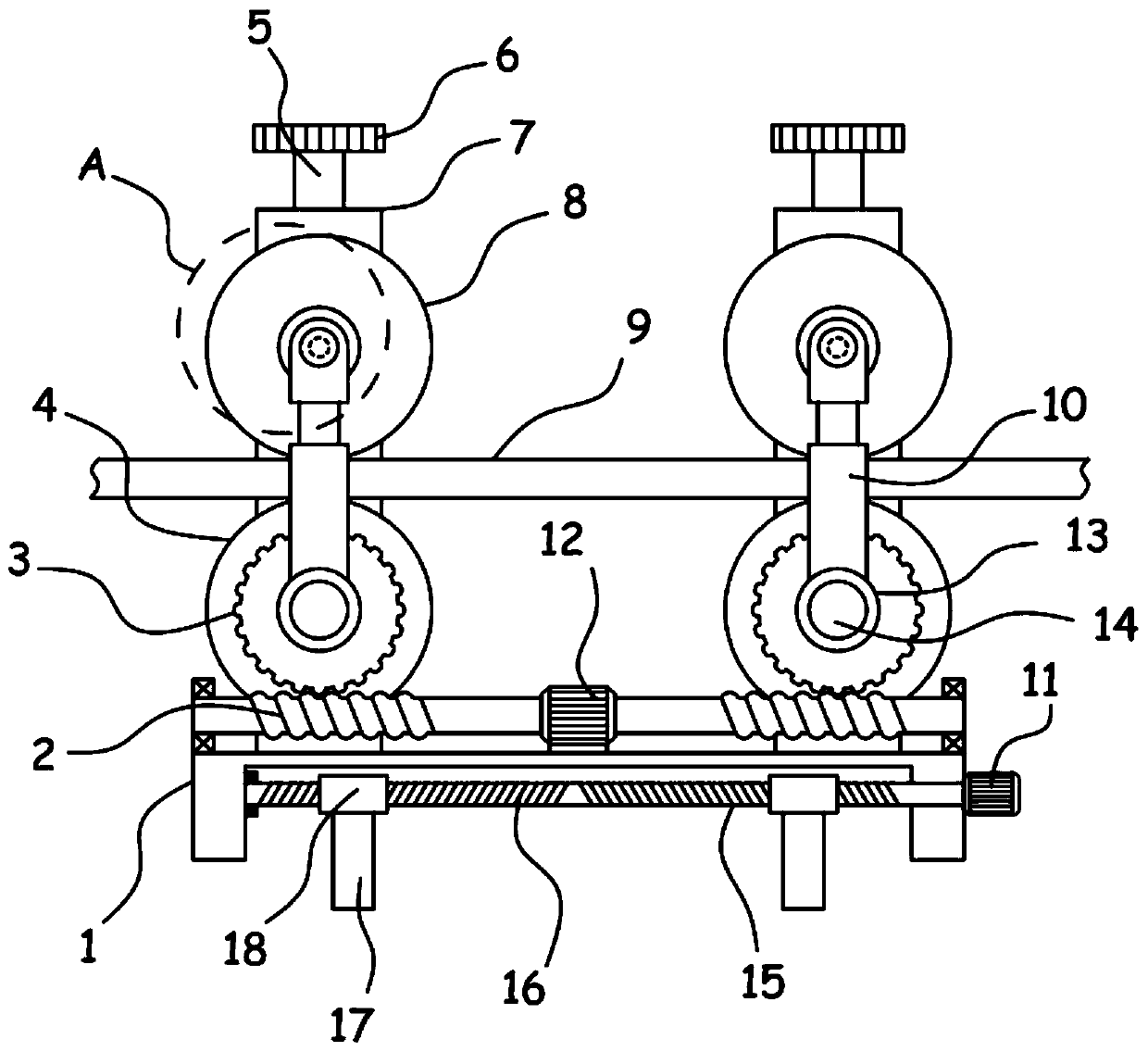
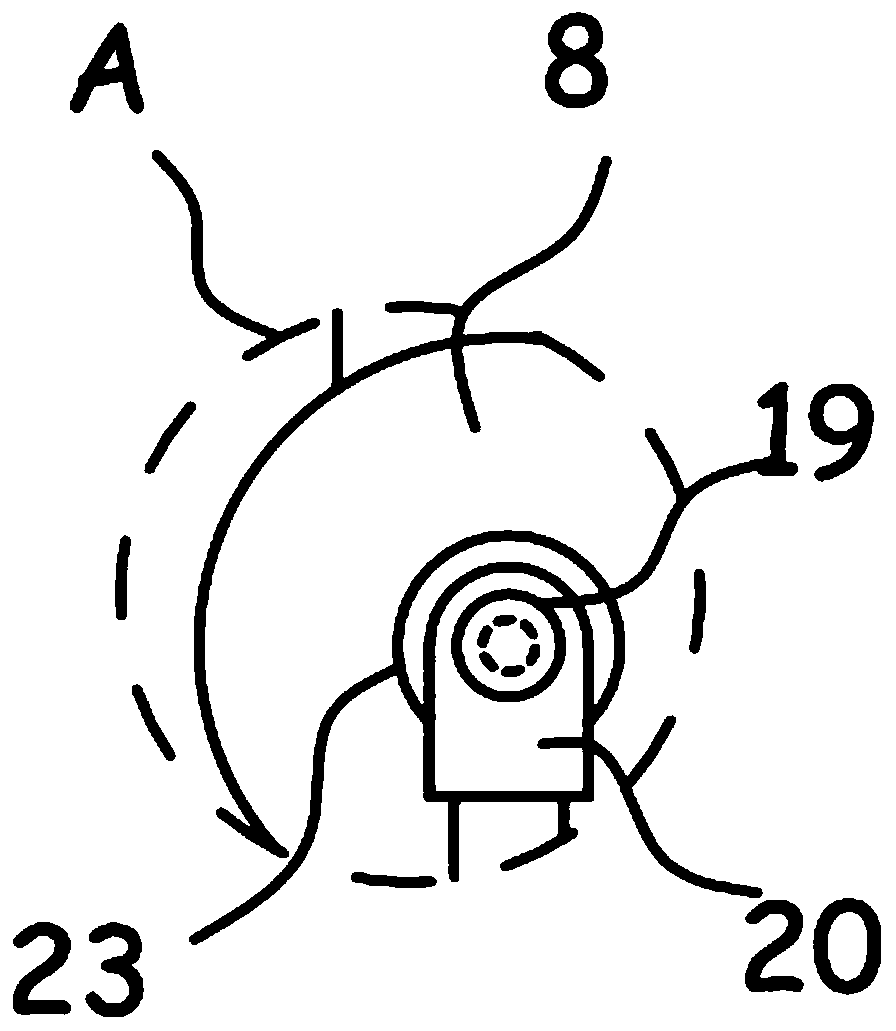
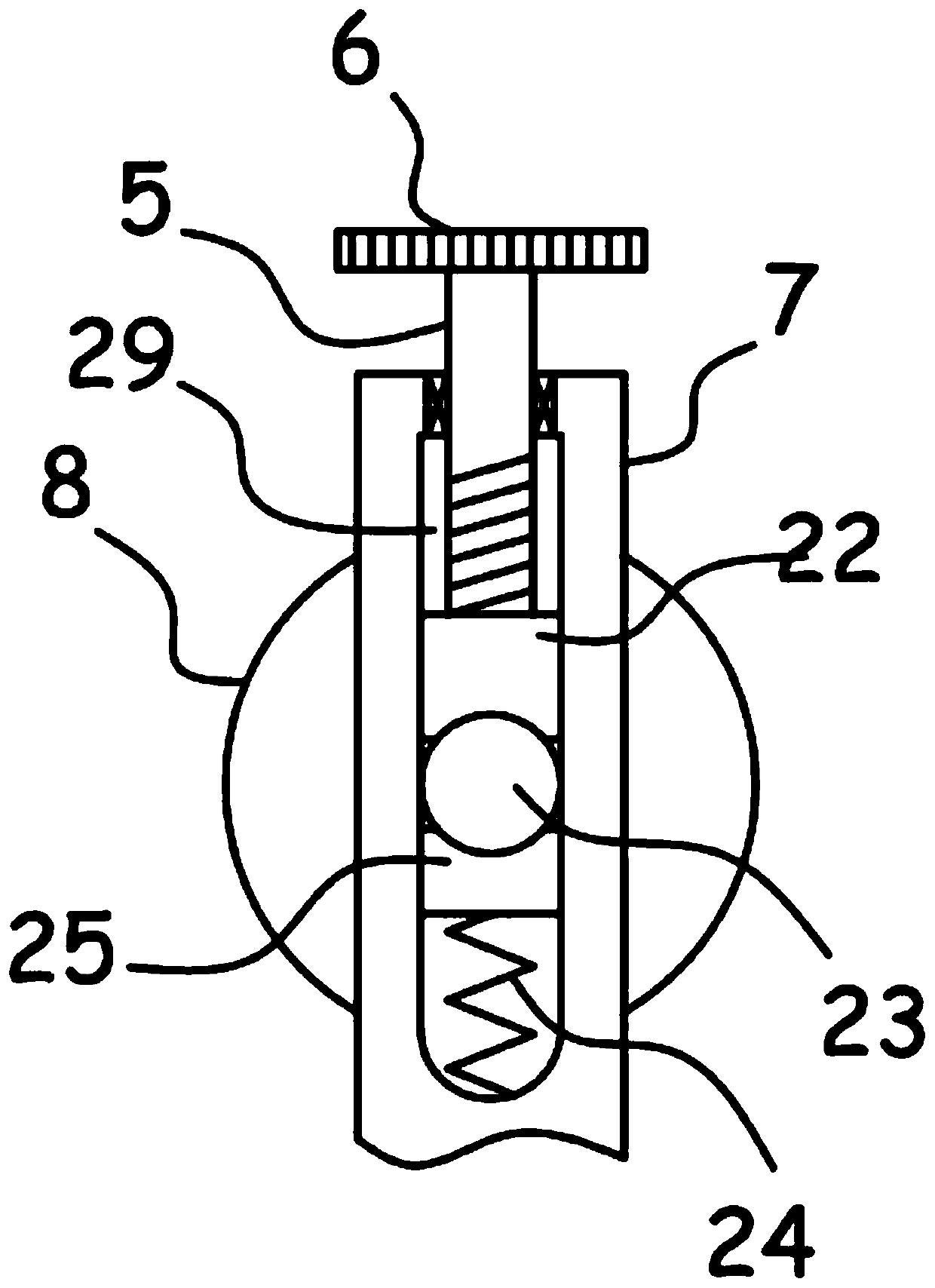
[0023] see Figure 1-5 , a line patrol robot walking device, comprising a moving frame 1, a biaxial motor 12 is fixed on the moving frame 1, two connecting plates 7 are vertically fixed on the moving frame 1, and each connecting plate 7 is provided with For the driven runner 8 and the driving runner 4 clamped up and down by the cable 9, the moving frame 1 is provided with a drive mechanism for driving the driving runner 4 to rotate, and the driven runner 8 is coaxially fixed with a driven shaft 23, the connecting plate 7 is provided with a chute 29 for the driven shaft 23 to slide through, the connecting plate 7 is provided with a lifting assembly for adjusting the longitudinal position of the driven shaft 23, the driven runner 8 and the driving A limit mechanism is connected between the runners 4 .
[0024] The driven runner 8 and the driving runner 4 in this device clamp the cable 9 from the upper and lower sides. When the driving mechanism drives the driving runner 4 to ro...
Embodiment 2
[0029] In order to further improve the walking stability of the walking device, on the basis of Embodiment 1, the device is also provided with a limit mechanism, which specifically includes a sleeve 13 sleeved on the drive shaft 14, and the sleeve 13 is vertically fixed with a limit Sleeve 10, a guide post 27 is slidably installed on the limit sleeve 10, the upper end of the guide post 27 is fixed with an adjustment sleeve block 20 coaxially connected with the driven shaft 23, and a return spring is fixed between the sleeve pipe 13 and the guide post 27 28.
[0030] After hanging the walking device on the cable 9, turn the limit sleeve 10 so that the adjustment block 20 connected thereon corresponds to the center of the driven shaft 23, and the adjustment block 20 is slidably embedded with a laterally arranged Insertion post 30, inserting post 30 and driven shaft 23 are slidably embedded and connected, adjusting sleeve 20 is pivotally connected with transverse screw rod 26 thr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More