

Finite time height and attitude tracking control method for unmanned helicopter
An unmanned helicopter, time-limited technology, applied in the field of flight control of unmanned helicopters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
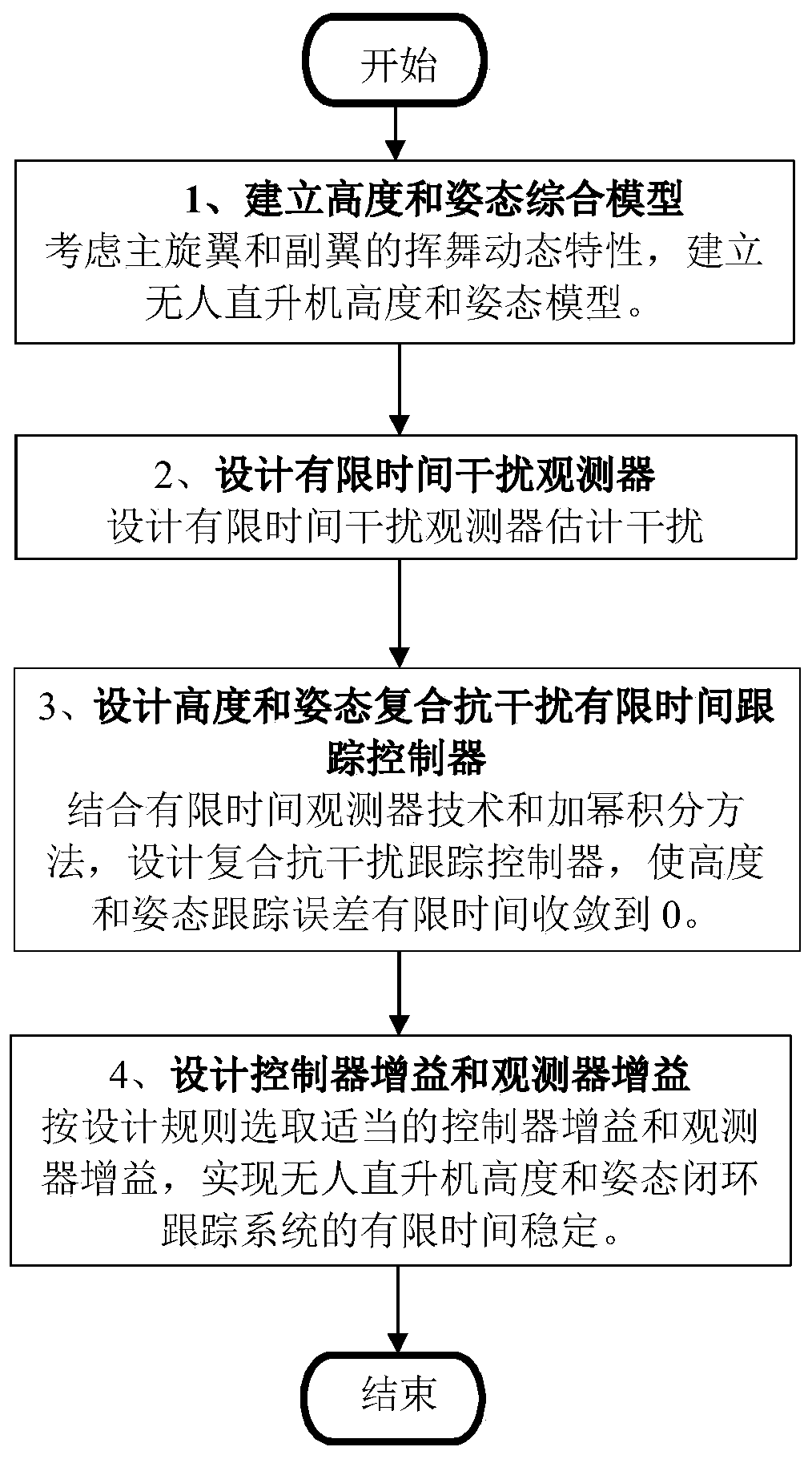
[0061] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
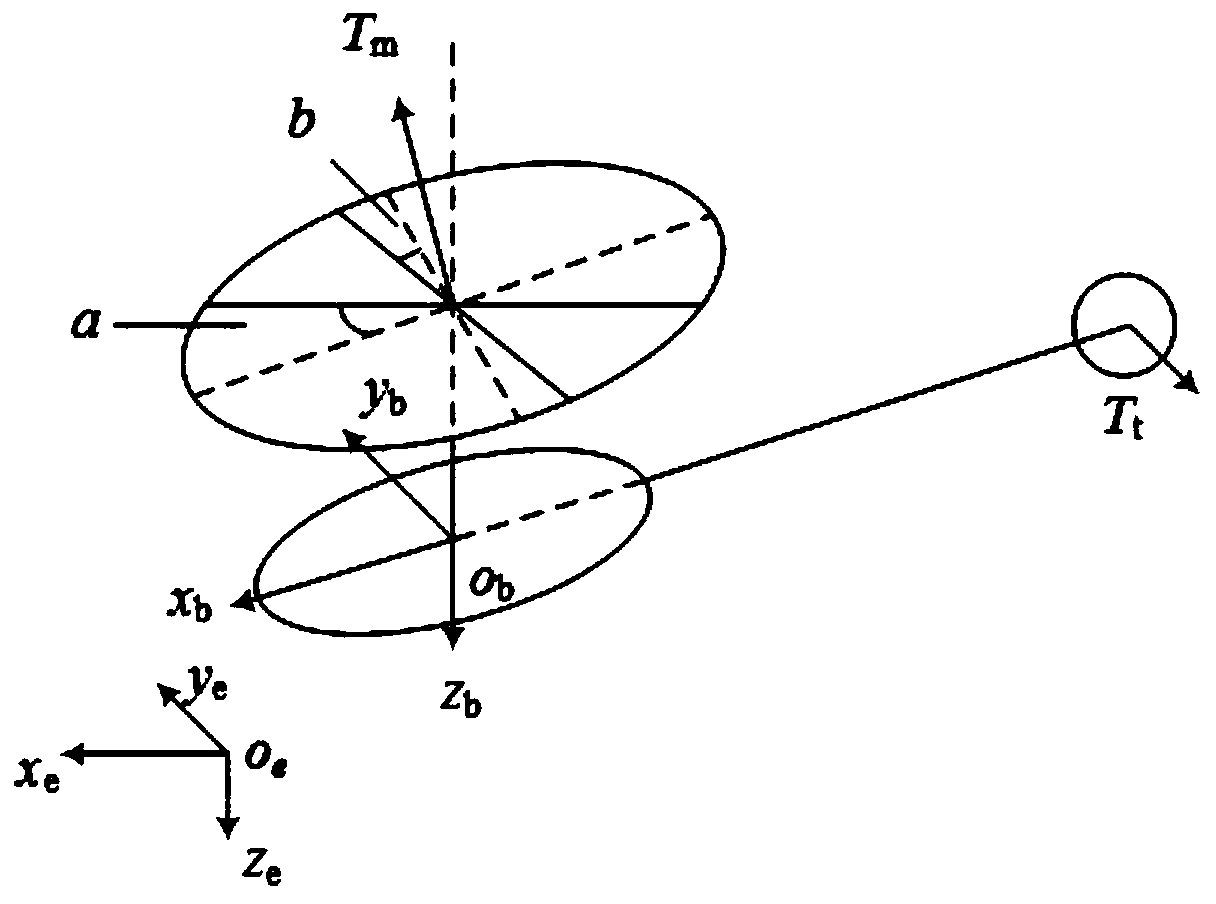
[0062] Step 1: Calculate the 6-DOF model, waving model, force and moment of the unmanned helicopter in sequence, and then comprehensively obtain the height and attitude model considering the interference.
[0063] (a) The unmanned helicopter model with 6 degrees of freedom is:
[0064]
[0065] Among them, m represents the mass of the unmanned helicopter, g, P=[x y z] T ∈ R 3 , η=[φ θ ψ] T ∈ R 3 and V=[V x V y V z ] T ∈ R 3 Respectively represent its gravitational acceleration, position, attitude and linear velocity in the inertial coordinate system; ω b =[p q r] T ∈ R 3 and f b =[f x f y f z ] T ∈ R 3 , τ b =[τ x τ y τ z ] T ∈ R 3 Respectively represent the attitude angular velocity and the force and moment it receives in the body coordinate system; p, q, r are the roll angular velocity, pitch angular velocity, and y...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More