Multi-legged robot based on Arduino Bluetooth wireless download
A multi-legged robot and wireless technology, applied in the field of multi-legged robots, can solve problems such as inability to realize communication with the host computer, inability to change, and inability to understand the mechanism of multi-legged movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
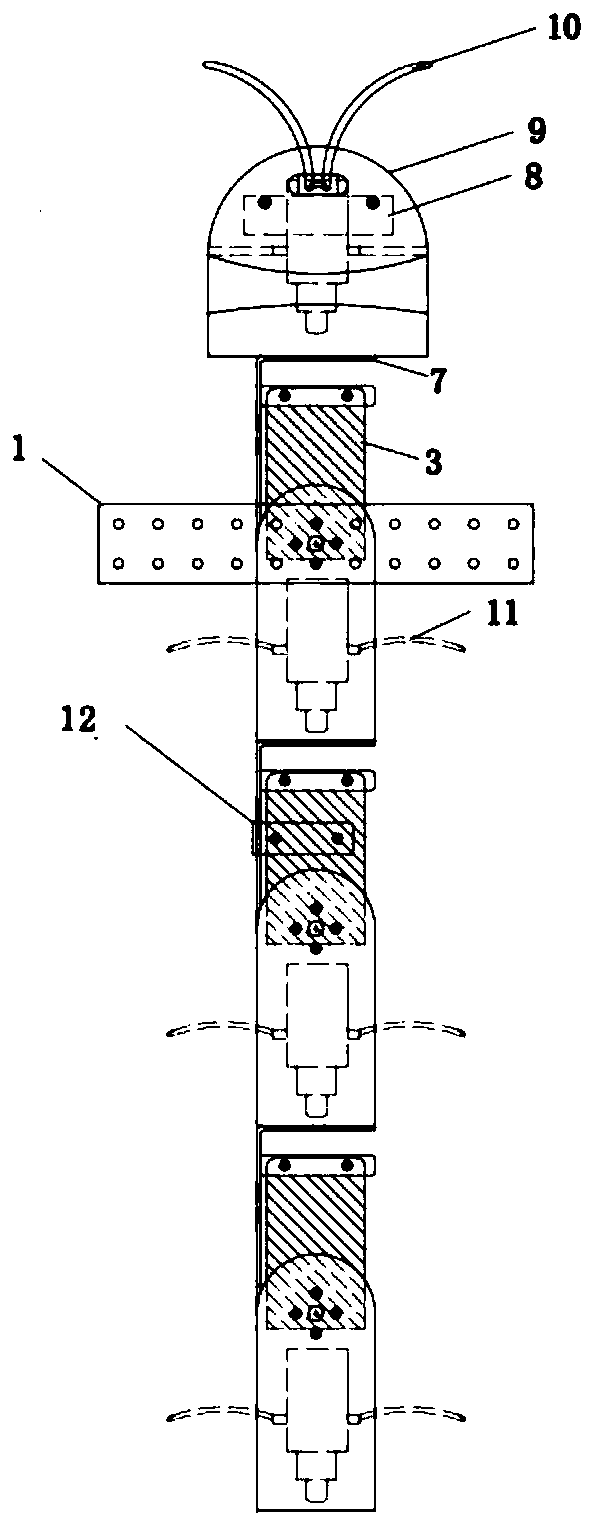
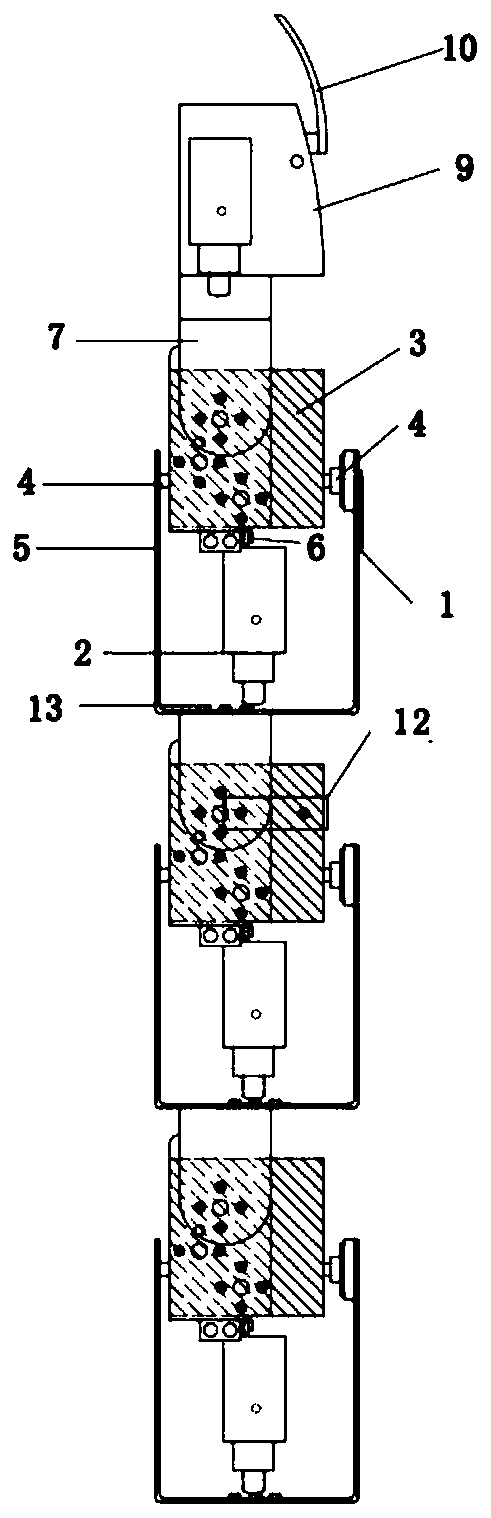
[0016] Such as figure 1 and figure 2 As shown, the multi-legged robot of this example is illustrated with a centipede as an example. The centipede robot of this example includes a head 9 and a torso connected to the head 9. A pair of antennae 10 are arranged on the head. The inner side is also provided with the motor 2 that is connected with the tentacles 10 roots, and drives the tentacles 10 to vibrate, and an obstacle avoidance device 8 is also provided. The obstacle avoidance device 8 of this example is an ultrasonic sensor, thereby avoiding collisions with obstacles ahead when advancing.
[0017] In order to simplify the structure, the torso of this example includes three successively hinged torso sections, and each torso section includes a pair of feet 11, which are symmetrically arranged on both sides of the torso section and driven si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com