

Control method of vascular robot based on bidirectional feedback
A two-way feedback and control method technology, applied in the direction of surgical robots, computer-aided surgery, computer-aided planning/modeling, etc., can solve the problems affecting the accuracy, positioning, trajectory, and operation control accuracy of micro-robots. Unable to fully grasp and other issues to achieve the effect of control optimization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
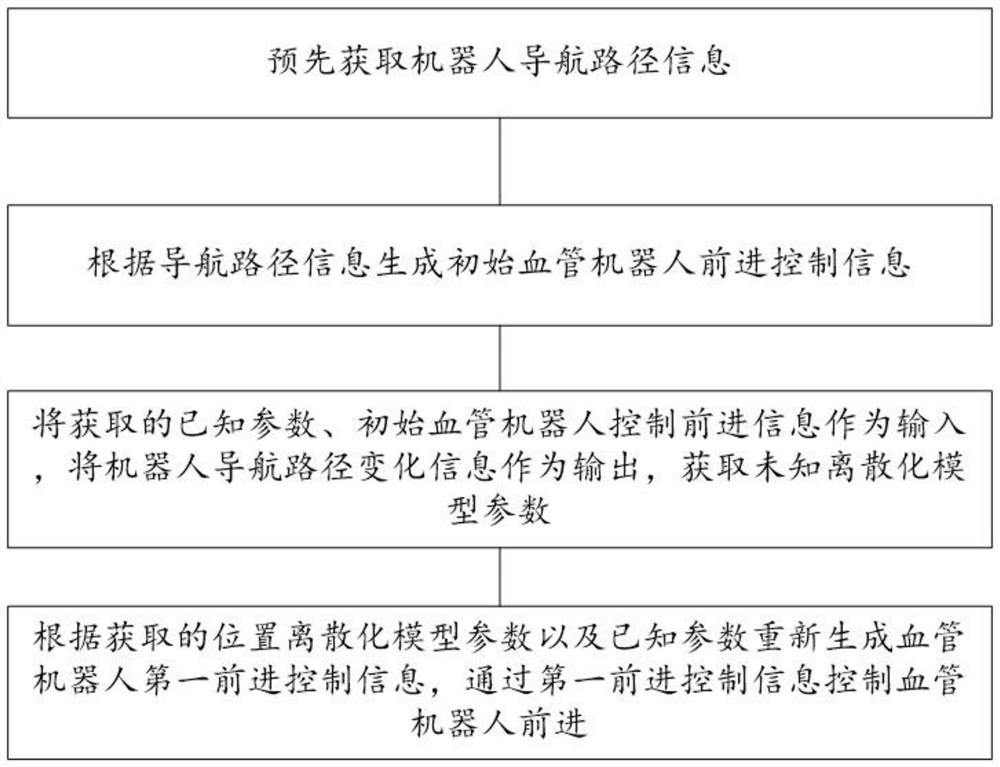
[0040] Such as figure 1 As shown, in an embodiment of the present invention, a control method of a vascular robot based on two-way feedback includes the following steps:
[0041] Acquire robot navigation path information in advance;
[0042] Optionally,
[0043] The pre-acquisition of robot navigation path information includes: obtaining original blood vessel image information obtained by CT scanning, and drawing the original blood vessel image information into a three-dimensional blood vessel skeleton network image; generating robot navigation path information according to the three-dimensional blood vessel skeleton network image.
[0044] Optionally,
[0045] After the robot navigation path information is generated according to the three-dimensional blood vessel skeleton network image, it also includes:
[0046] According to the three-dimensional blood vessel stock price network image and the navigation coordinate information, the driving trajectory of the robot is segmen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More