

Method and device for controlling robot to perform video monitoring and terminal equipment
A terminal device and video monitoring technology, applied in the field of robots, can solve the problems of loud and abnormal noise, affecting the monitoring effect, etc., to achieve the effect of improving the monitoring effect and avoiding the effect of abnormal noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
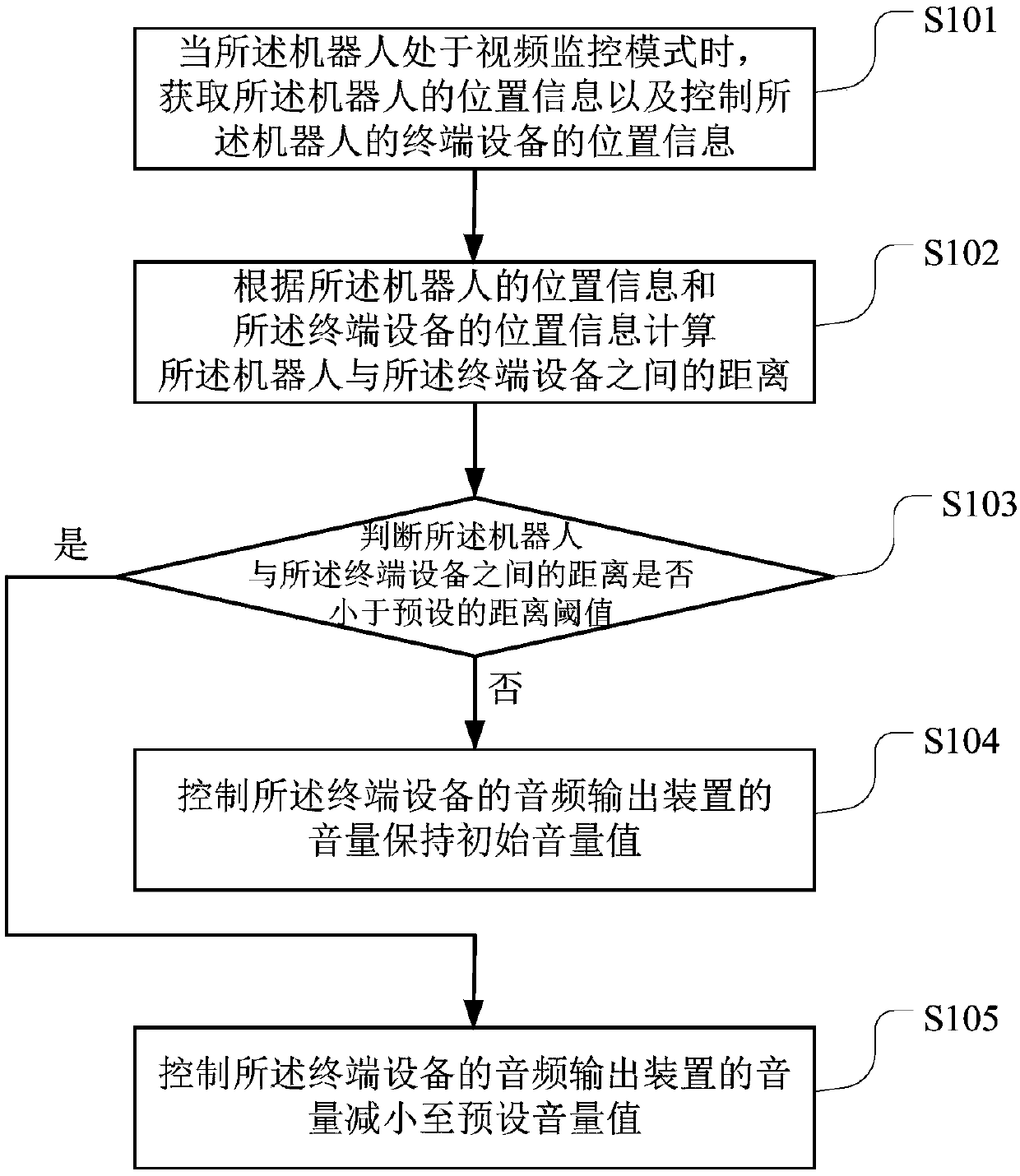
[0057] Such as figure 1 As shown, it is a schematic flowchart of a method for controlling a robot to perform video surveillance provided by an embodiment of the present invention, and the method may include:
[0058] Step S101 , when the robot is in a video monitoring mode, acquire location information of the robot and location information of a terminal device controlling the robot.
[0059]Specifically, the location information of the robot can be obtained through the built-in GPS of the robot, and its location information is recorded in the form of coordinates as (x 1 ,y 1 ), the position information of the terminal device can be obtained by the built-in GPS of the terminal device, and its position information is recorded in the form of coordinates as (x 2 ,y 2 ).
[0060] Step S102, calculating the distance between the robot and the terminal device according to the position information of the robot and the position information of the terminal device.
[0061] Specifica...
Embodiment 2
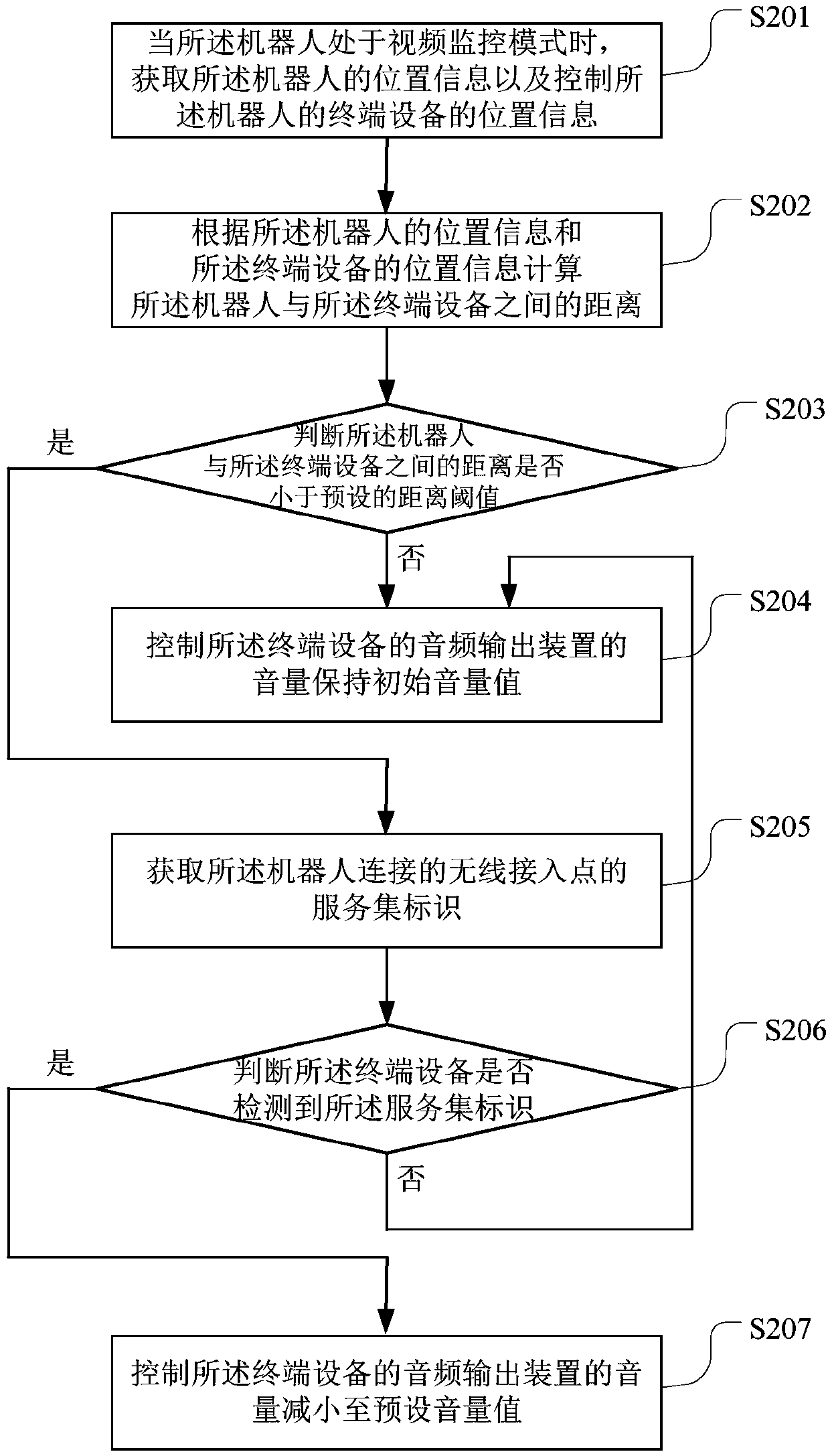
[0077] Such as figure 2 As shown, it is a schematic flowchart of a method for controlling a robot to perform video surveillance provided by an embodiment of the present invention, and the method may include:
[0078] Step S201 , when the robot is in a video monitoring mode, acquire location information of the robot and location information of a terminal device controlling the robot.
[0079] Step S202, calculating the distance between the robot and the terminal device according to the position information of the robot and the position information of the terminal device.
[0080] Step S203, judging whether the distance between the robot and the terminal device is smaller than a preset distance threshold.
[0081] If the distance between the robot and the terminal device is greater than or equal to the distance threshold, perform step S204, and if the distance between the robot and the terminal device is less than the distance threshold, perform step S205 and its next steps. ...
Embodiment 3
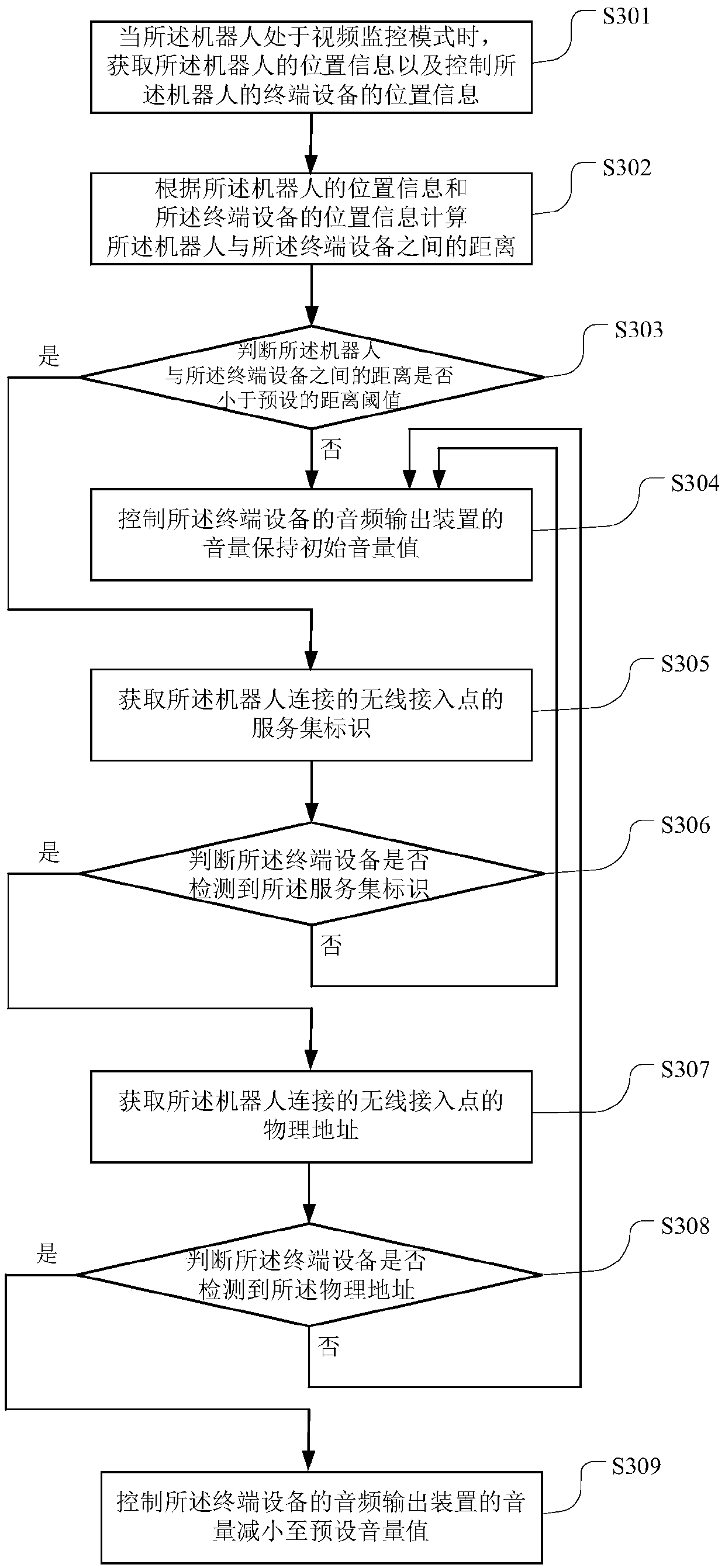
[0095] Such as image 3 As shown, it is a schematic flowchart of a method for controlling a robot to perform video surveillance provided by an embodiment of the present invention, and the method may include:
[0096] Step S301 , when the robot is in a video monitoring mode, acquire location information of the robot and location information of a terminal device controlling the robot.
[0097] Step S302, calculating the distance between the robot and the terminal device according to the position information of the robot and the position information of the terminal device.
[0098] Step S303, judging whether the distance between the robot and the terminal device is smaller than a preset distance threshold.
[0099] If the distance between the robot and the terminal device is greater than or equal to the distance threshold, perform step S304, and if the distance between the robot and the terminal device is less than the distance threshold, perform step S305 and its next steps. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More