Mobile robot path planning method for improving probabilistic roadmap method
A mobile robot and path planning technology, applied in the field of robotics, can solve the problems that the planned path is not optimal, it is difficult to ensure multiple sampling points, and the planned path fails, so as to improve the planning speed, shorten the search time, and improve the path safety. added effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Hereinafter, the present invention will be further described in detail through specific embodiments in conjunction with the drawings. Among them, similar elements in different embodiments use related similar element numbers. In the following embodiments, many detailed descriptions are used to make the present application better understood. However, those skilled in the art can easily realize that some of the features can be omitted under different circumstances, or can be replaced by other elements, materials, and methods.
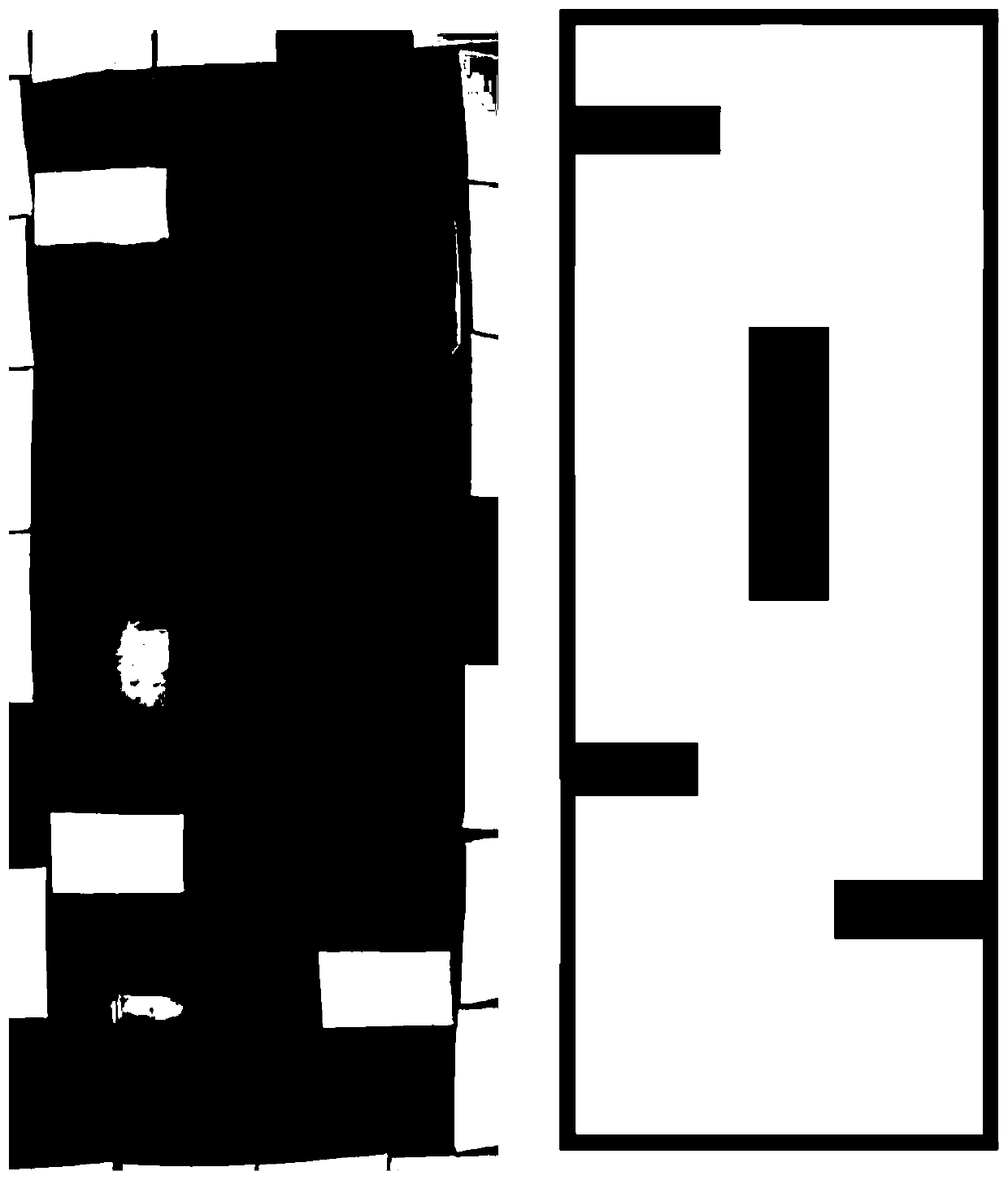
[0031] The present invention is based on the random path map method (Probabilistic Roadmaps, PRM), which solves the problem of the actual path planning of the mobile robot; its specific technical scheme is: converting the actual environment map into a binary map, and using adaptive sampling and Combining Gaussian sampling to increase the number of sampling points in difficult areas (such as narrow channels), making it more adaptable to complex maps; i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More