

Autonomous stable multi-degree-of-freedom motion controllable pod type underwater towed body
A degree of freedom and pod-type technology, applied to underwater ships, underwater operating equipment, motor vehicles, etc., can solve problems such as structural damage, deterioration of the stability of the towed body course, and overturning, and achieve the effect of strong autonomous stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to better support the present invention, the present invention will be further described below in conjunction with the accompanying drawings, but the embodiments of the present invention are not limited thereto.
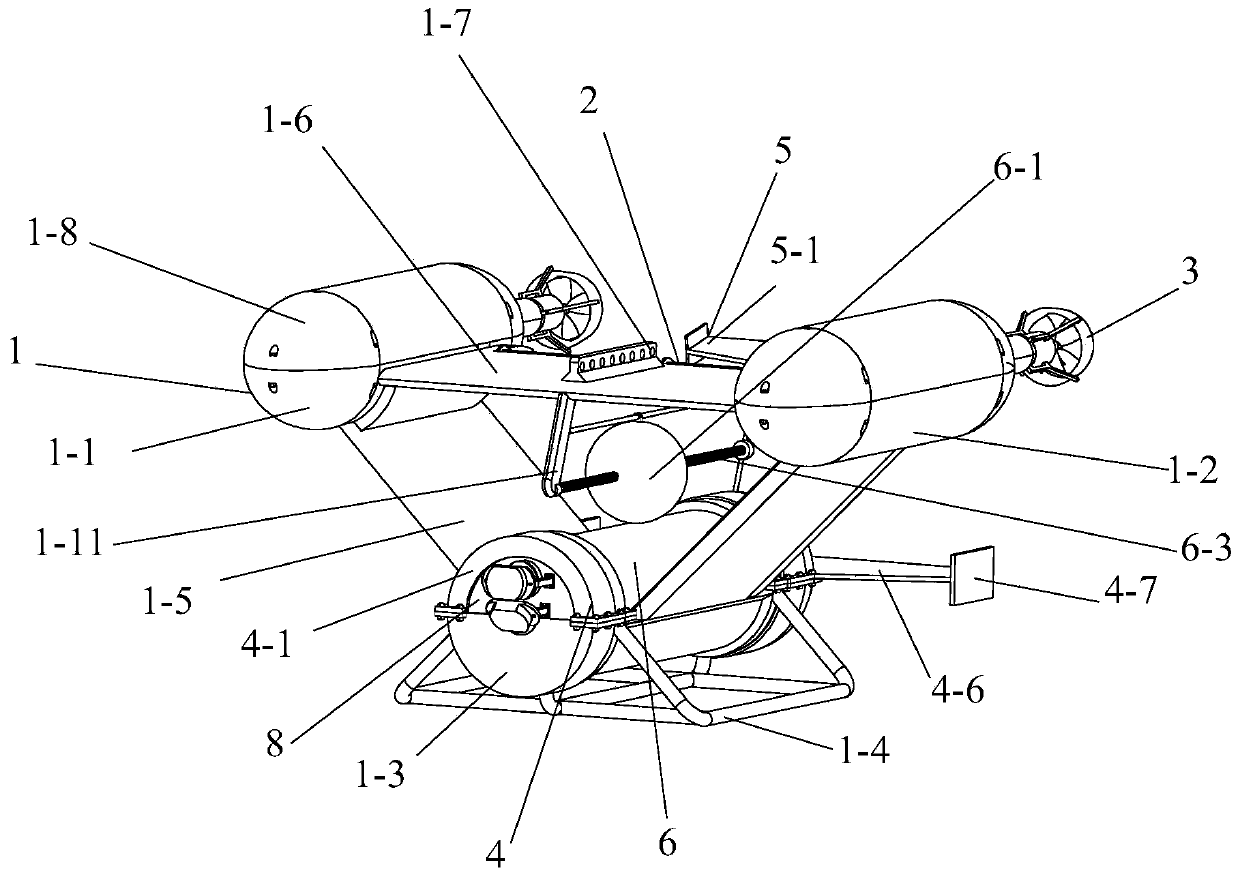
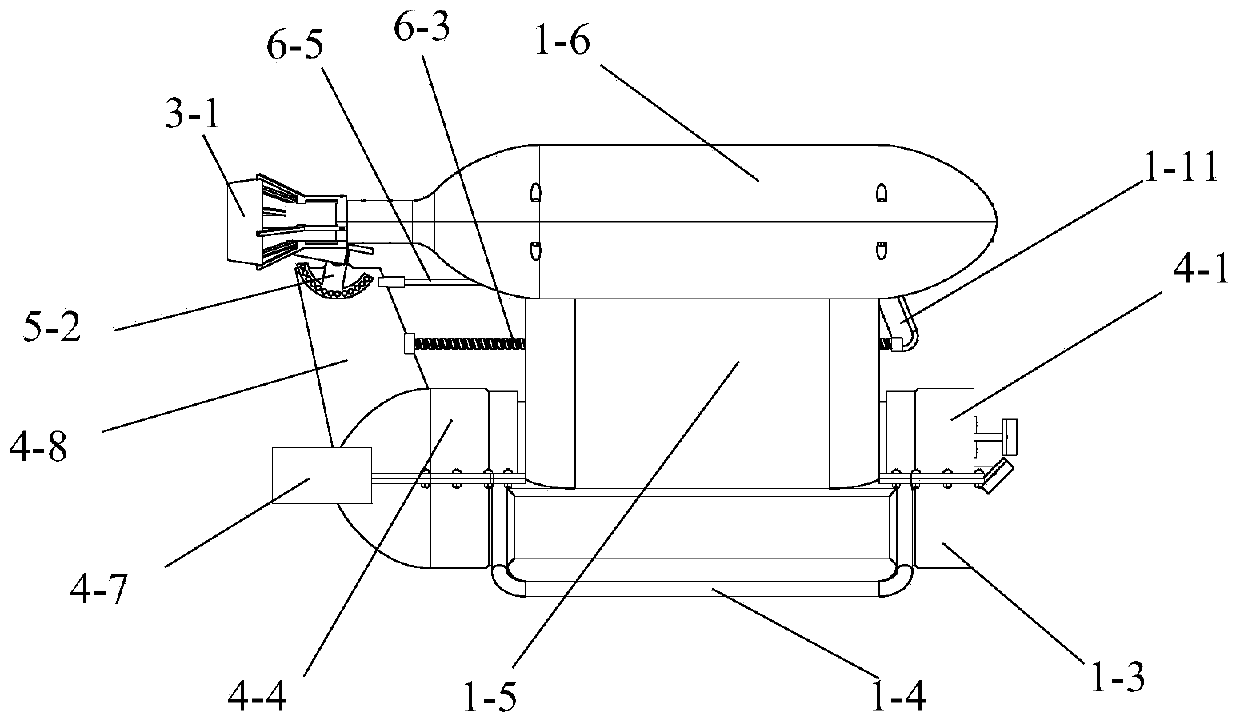
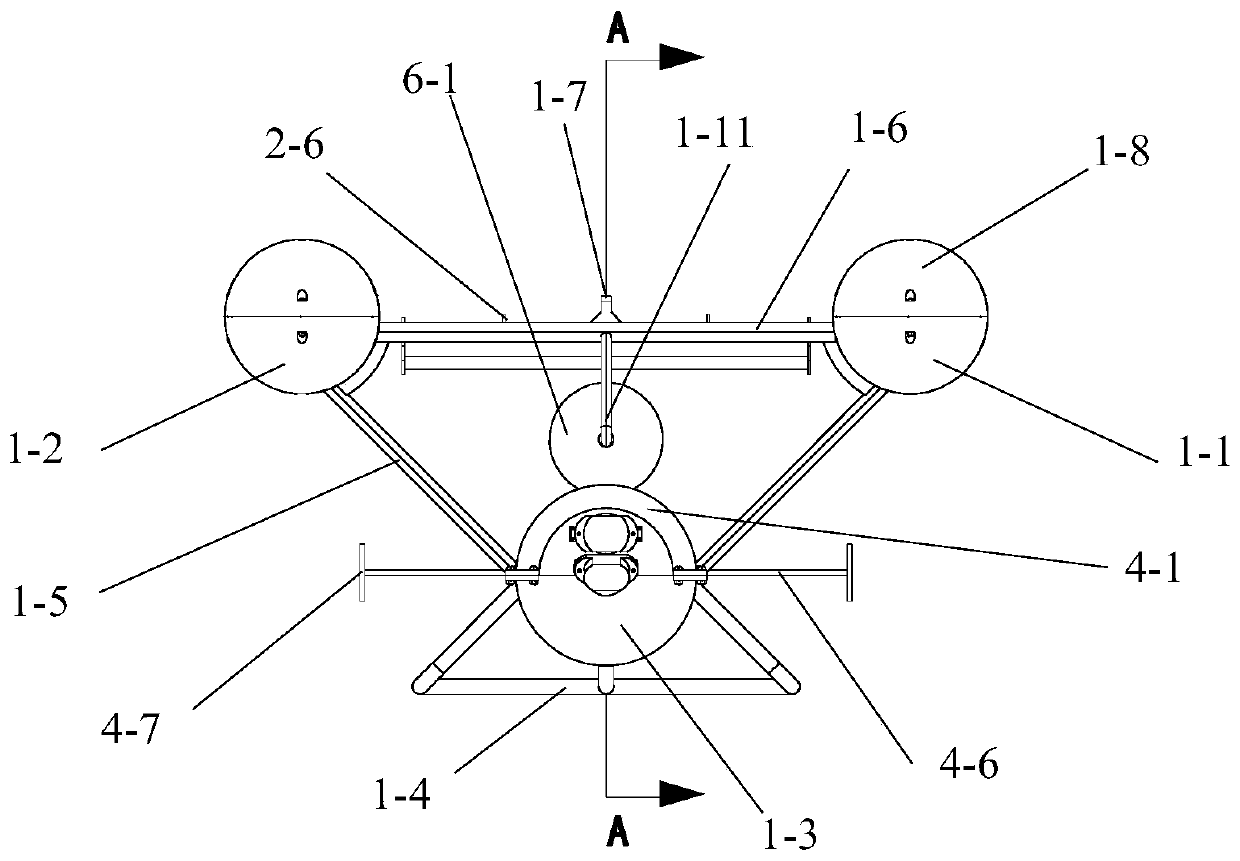
[0053] Such as Figure 1-Figure 8 As shown, an autonomous stable multi-degree-of-freedom movement controllable pod-type underwater towing body includes a main body 1, a heave control mechanism 2, a bow control mechanism 3, an instrument pod fixing mechanism 4, and a wing-type pitch control mechanism 5. Float type trim control mechanism 6, heel control system 7 and instrument pod 8.
[0054] Main body 1 includes left heave control cabin 1-1, right heave control cabin 1-2, instrument pod base 1-3, bracket 1-4, diagonal brace 1-5, horizontal brace 1-6, tow cable fixing parts 1-7; the left heave control cabin 1-1 and the right heave control cabin 1-2 are columnar cavity structures, and the left heave control cabin 1-1 and the right heave control cabin 1-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More