

Automobile welding spot path planning method based on slime mold-ant colony fusion algorithm
A technology that integrates algorithms and path planning. It is applied in the directions of calculation, calculation model, road network navigator, etc. It can solve the problems such as the inability to further improve the production efficiency of automobiles and the slow convergence speed, so as to improve the planning efficiency, reduce the point degree, reduce the The effect of the probability of being trapped in a local optimum
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
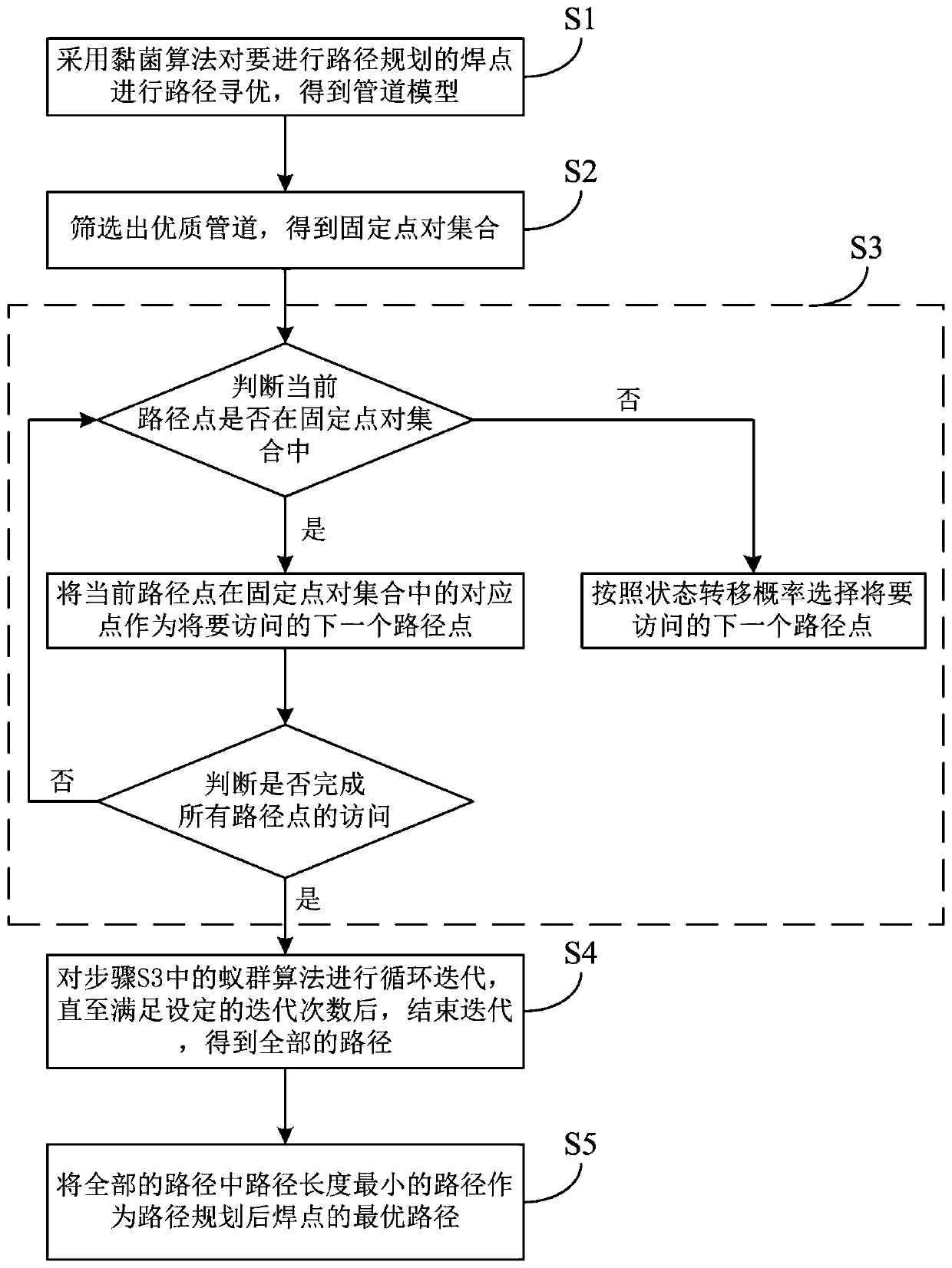
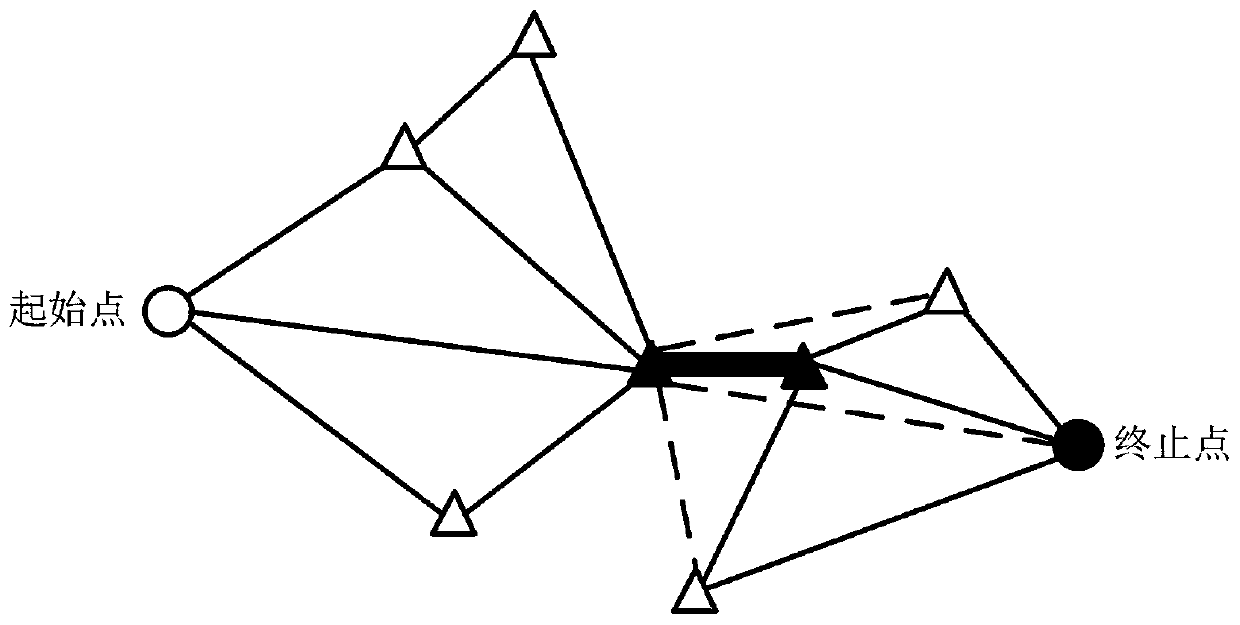
[0017] The invention provides a method for planning the path of automobile solder joints based on the slime mold-ant colony fusion algorithm. The method is realized based on a new algorithm for fixed selection of high-quality pipelines, that is, the slime mold-ant colony fusion algorithm. The specific content of the method is : Firstly, high-quality pipelines with high pheromone flow rate are obtained through the slime mold algorithm's method of "key pipeline cultivation"; then, the two ends of the selected high-quality pipelines are used as fixed point pairs to obtain a set of fixed point pairs; then, the fixed point pairs are obtained. These fixed path segments corresponding to the point pair set are applied to the ant colony algorithm to complete the directional selection of some path points in the optimization process of the ant colony algorithm (that is, after a point in the fixed point pair is selected, the next point is directly determined), In this way, the fusion of sl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More