

Unmanned aerial vehicle based power patrol inspection method and system
A technology of electric power inspection and unmanned aerial vehicle, applied in control/regulation system, inspection time patrol, non-electric variable control and other directions, can solve problems such as increasing the workload of operators, and achieve the effect of reducing workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
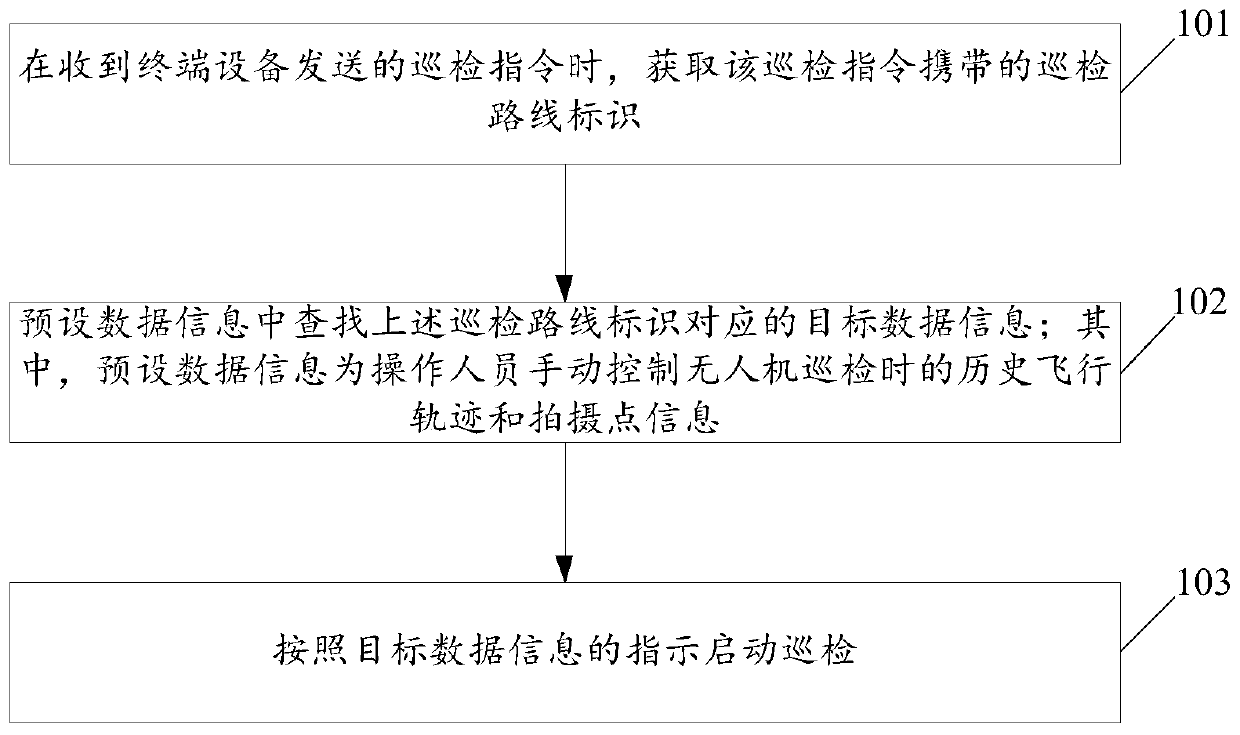
[0060] see figure 1 , figure 1 It is a schematic flow chart of a UAV-based power inspection method disclosed in an embodiment of the present invention. Such as figure 1 As shown, the method may include the following steps:
[0061] 101. When receiving an inspection instruction sent by a terminal device, acquire an inspection route identifier carried in the inspection instruction.
[0062] In this embodiment of the present invention, the terminal device mentioned in step 101 may be various electronic devices such as smart phones, smart watches, and tablets, which are not limited in this embodiment of the present invention. Wherein, the operating system of various electronic devices may include but not limited to Android operating system, IOS operating system, Symbian (Symbian) operating system, Black Berry (Blackberry) operating system, Windows Phone8 operating system, etc., the embodiment of the present invention does not Do limited.
[0063] Optionally, a control applica...
Embodiment 2
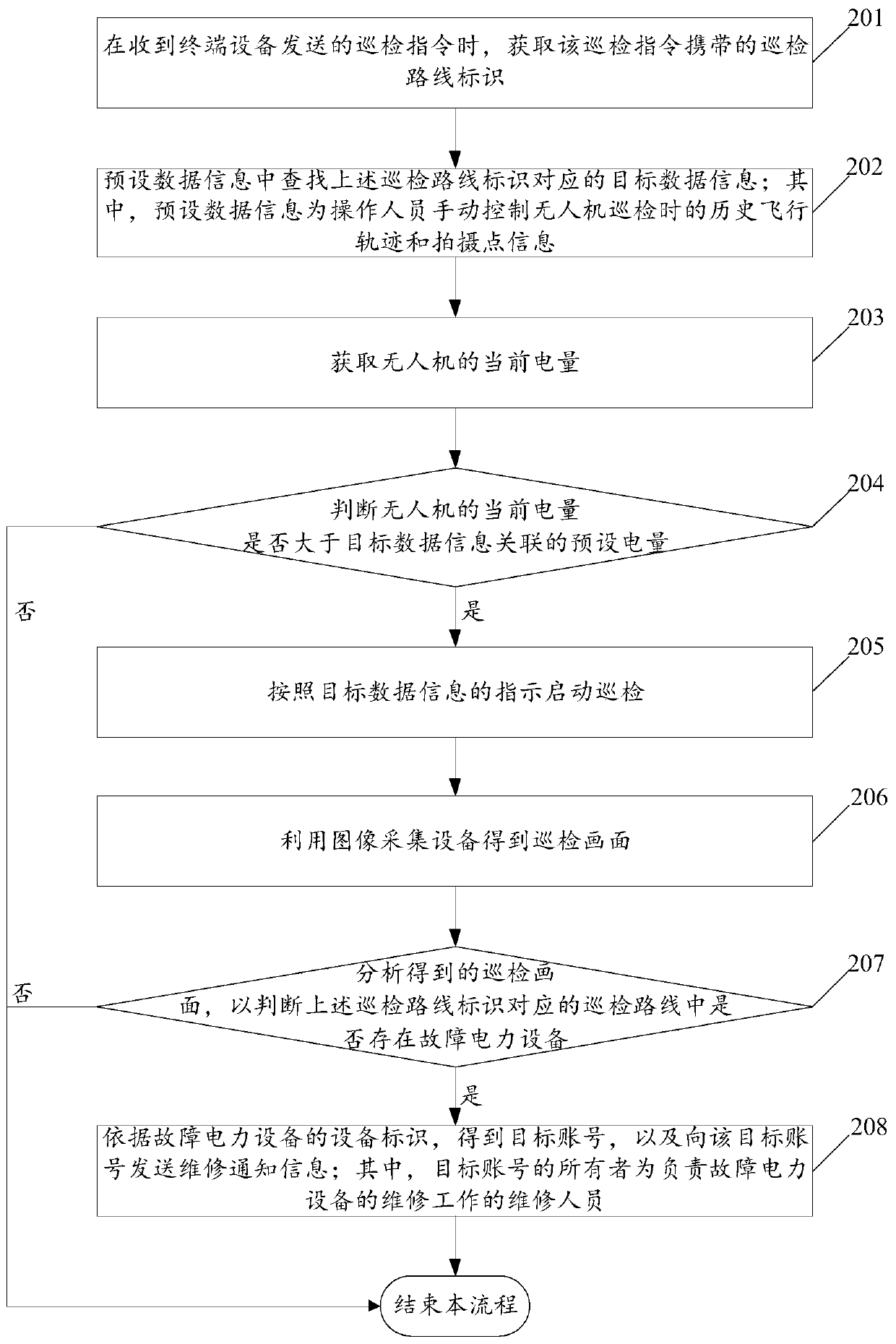
[0074] see figure 2 , figure 2 It is a schematic flow chart of another unmanned aerial vehicle-based power inspection method disclosed in the embodiment of the present invention. Such as figure 2 As shown, the method may include the following steps:
[0075] Wherein, for the detailed description of steps 201 to 202, please refer to the introduction of steps 101 to 102 in Embodiment 1, which will not be repeated in this embodiment of the present invention.
[0076] 203. Obtain the current power of the drone.
[0077] 204. Determine whether the current power of the drone is greater than the preset power associated with the target data information, if yes, perform steps 205 to 207; if no, end this process.
[0078] 205. Start the inspection according to the instruction of the target data information.
[0079] In the embodiment of the present invention, step 203 to step 205 are executed to detect the current power of the UAV before starting the inspection, so as to ensure ...
Embodiment 3
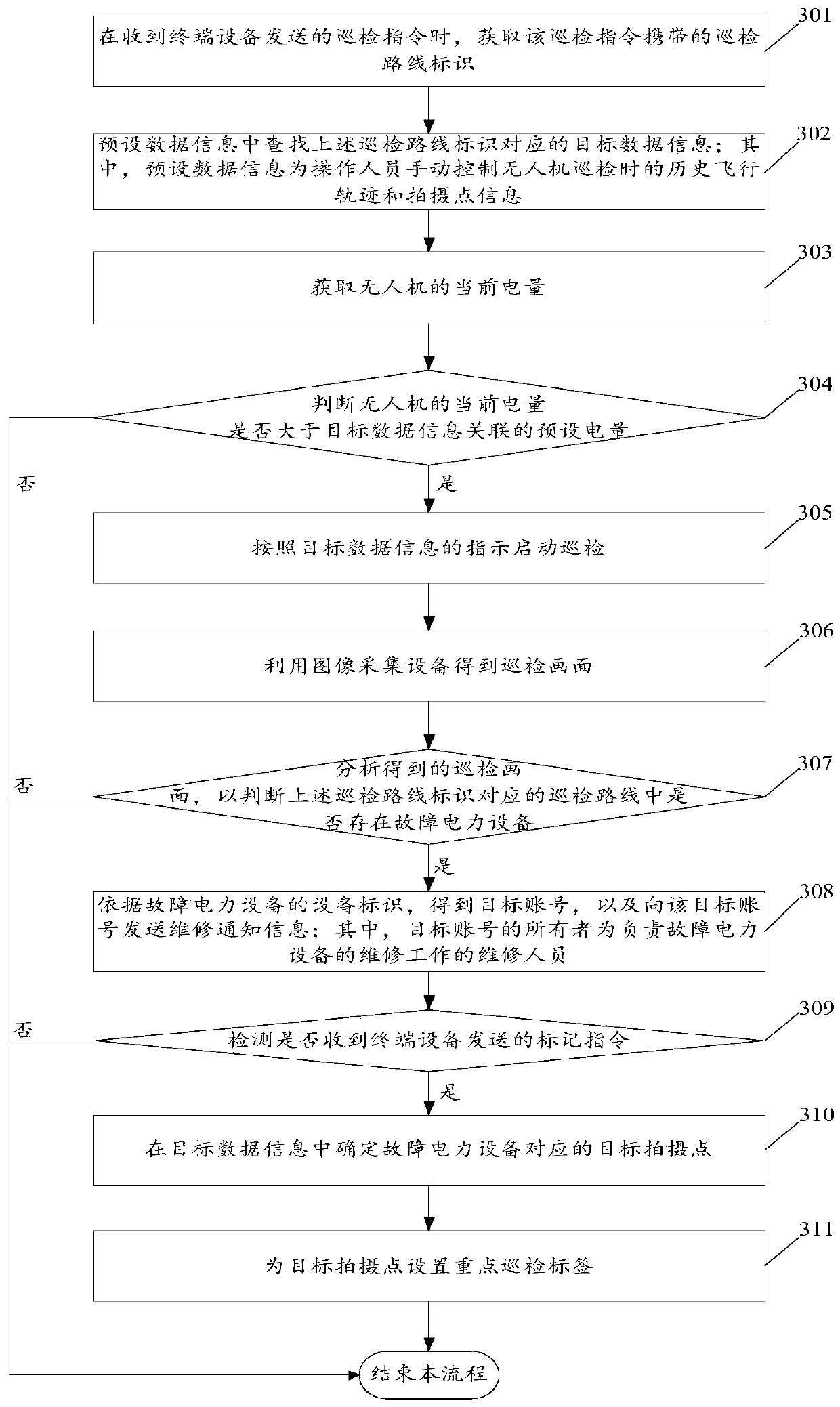
[0100] see image 3 , image 3 It is a schematic flow chart of another unmanned aerial vehicle-based power inspection method disclosed in the embodiment of the present invention. Such as image 3 As shown, the method may include the following steps:
[0101] Wherein, for the detailed description of steps 301 to 308, please refer to the introduction of steps 201 to 208 in Embodiment 2, which will not be repeated in this embodiment of the present invention.
[0102] 309. Detect whether the marking instruction sent by the terminal device is received, if yes, execute steps 310 to 311; if no, end this process.
[0103] 310. Determine a target shooting point corresponding to the faulty power equipment in the target data information.
[0104] 311. Set a key inspection label for the target shooting point.
[0105] Steps 309 to 311 are executed, and by marking the shooting points corresponding to the faulty power equipment, the operator can intuitively know the shooting points cor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More