

Workpiece Fatigue Testing Method Based on Collaborative Robot
A technology of fatigue testing and robotics, which is applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as large workpiece errors, complex implementation, and test failures, and achieves avoidance of special-purpose machine structure design, versatility, and good compliance effects Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
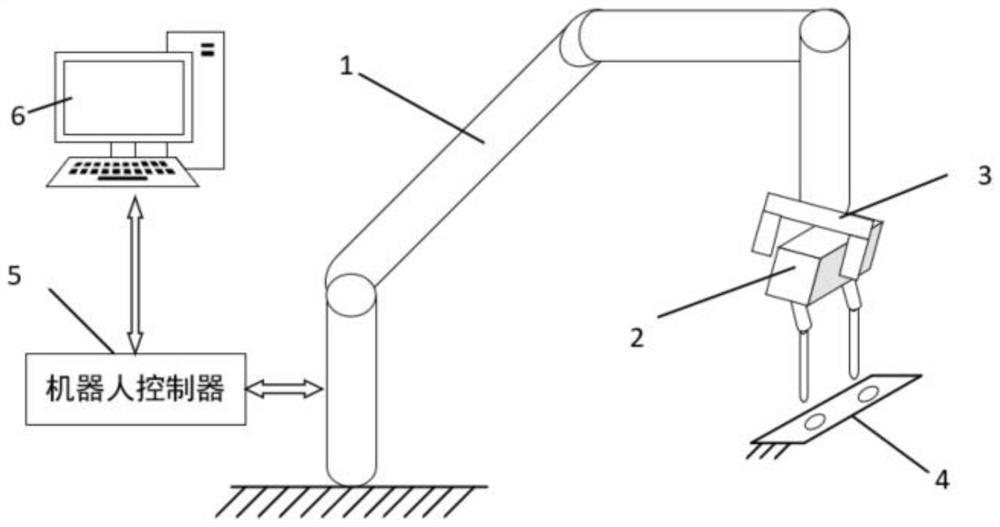
[0042] The assembly of traditional industrial robots has the characteristics of high repeat positioning accuracy, high efficiency, large range of motion, and high rigidity, emphasizing speed and accuracy. The collaborative robot emphasizes flexibility and human-machine cooperation, and has the characteristics of safety, lightness, and sensitivity. Collaborative robots are often equipped with torque sensors inside the joints, so they are more sensitive to force perception. When testing the powerful interaction between workpieces a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More