

Adaptive unscented Kalman particle filtering method
An unscented Kalman and particle filter technology, applied in navigation, instrumentation, surveying and navigation, etc., can solve problems such as the inability of the system to perceive, the poor state estimation effect of strongly nonlinear systems, and the deterioration of filtering results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0097] The present invention will be described in further detail below.
[0098] An adaptive unscented Kalman particle filter method, which determines the recommended probability density function according to the unscented Kalman filter UKF, uses particle filter to estimate the state of the strong nonlinear system, and makes real-time estimation of the external noise, greatly reducing noise anomalies navigation results.
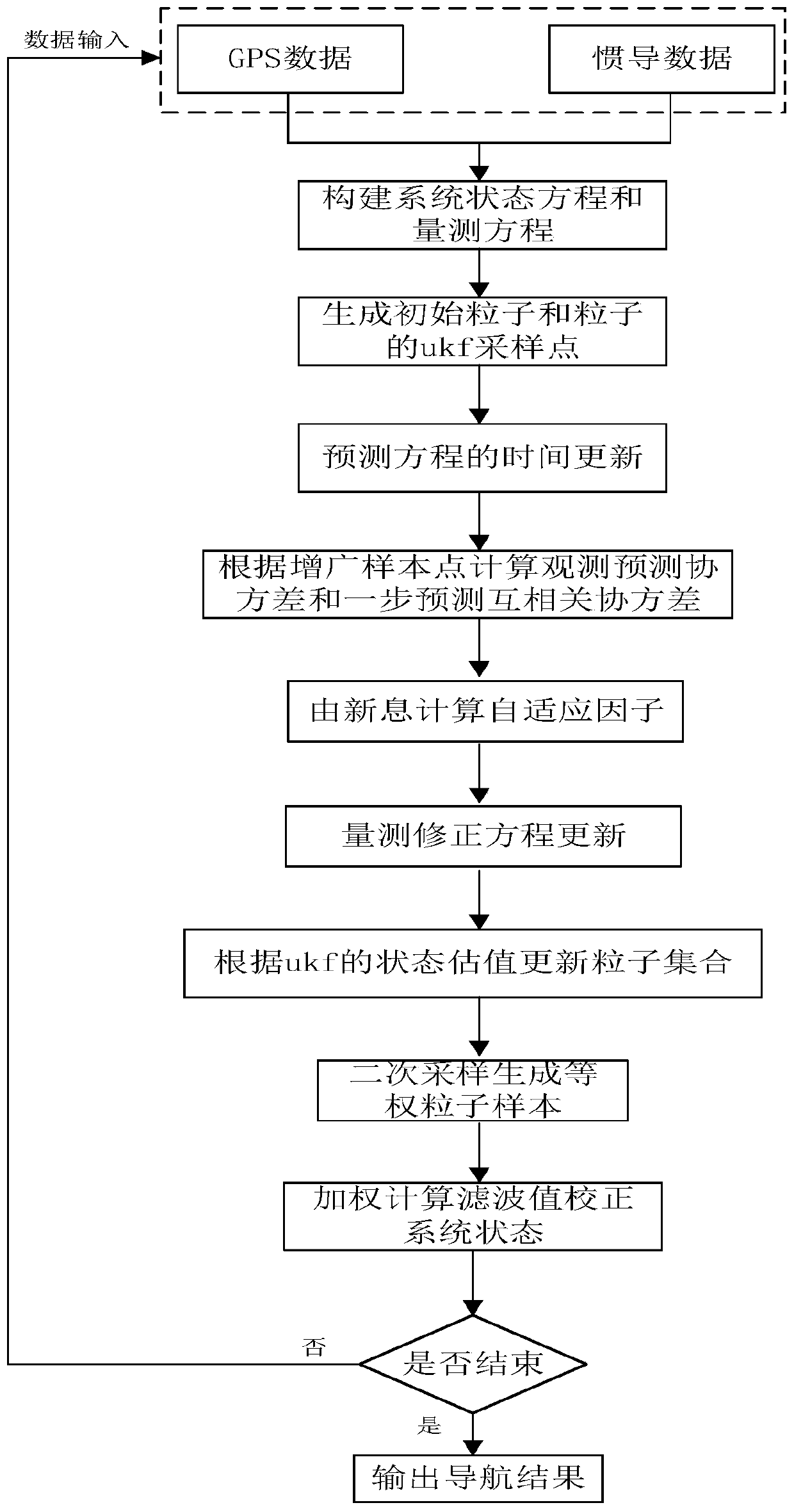
[0099] like figure 1 As shown, an adaptive unscented Kalman particle filter method, the steps are as follows:
[0100] Step 1. Carry out nonlinear system modeling for the inertial / satellite tight integrated navigation system, where the error amount X of the strapdown inertial navigation system is selected I and GPS error amount X G As the state quantity of the whole system, namely:
[0101]
[0102] in, are the attitude error angles in the three directions of the northeast sky, δV E , δV N , δV U are the velocity errors in the three directions of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More