

Four-shaft clamping type welding robot
A welding robot and shaft card technology, which is applied to welding equipment, welding equipment, welding accessories, etc., can solve the problems that the angle of the welding torch of the welding robot cannot be adjusted, affects the use, and cannot meet the welding of 60° fillet welds.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Below in conjunction with accompanying drawing and embodiment example, the present invention will be further described:
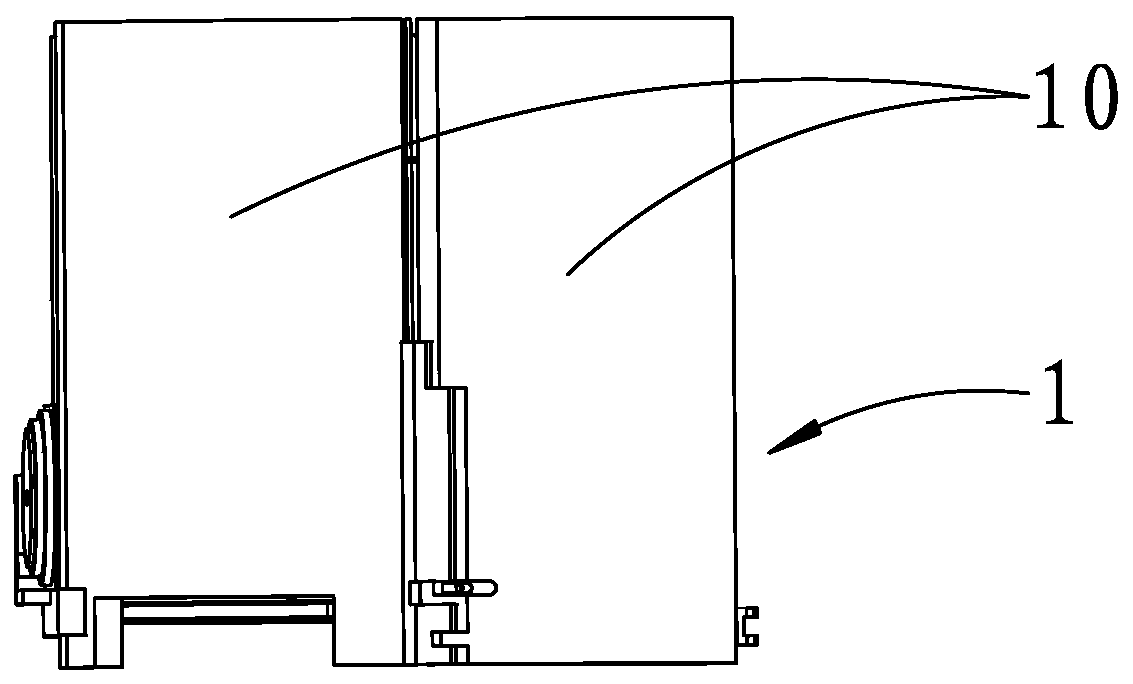
[0035] A four-axis clip-type welding robot includes a fuselage 1 for fixing a pipe to be welded and a welding actuator 4 for welding the pipe to be welded. The welding actuator 4 is connected to the fuselage 1 .
[0036] In this example: if figure 1 As shown: the fuselage 1 includes a plurality of independent fuselage blocks 10, and a plurality of fuselage blocks 10 are selected to be connected to each other to form the fuselage 1. After the connection, the multiple fuselage blocks 10 can be relatively rotated to make the fuselage The inner diameter of 1 is adjustable, and it is formed into a shape at least partially matching the outer diameter of the pipe to be welded, and the fuselage block 10 can be clamped on the pipe to be welded by fixing them.
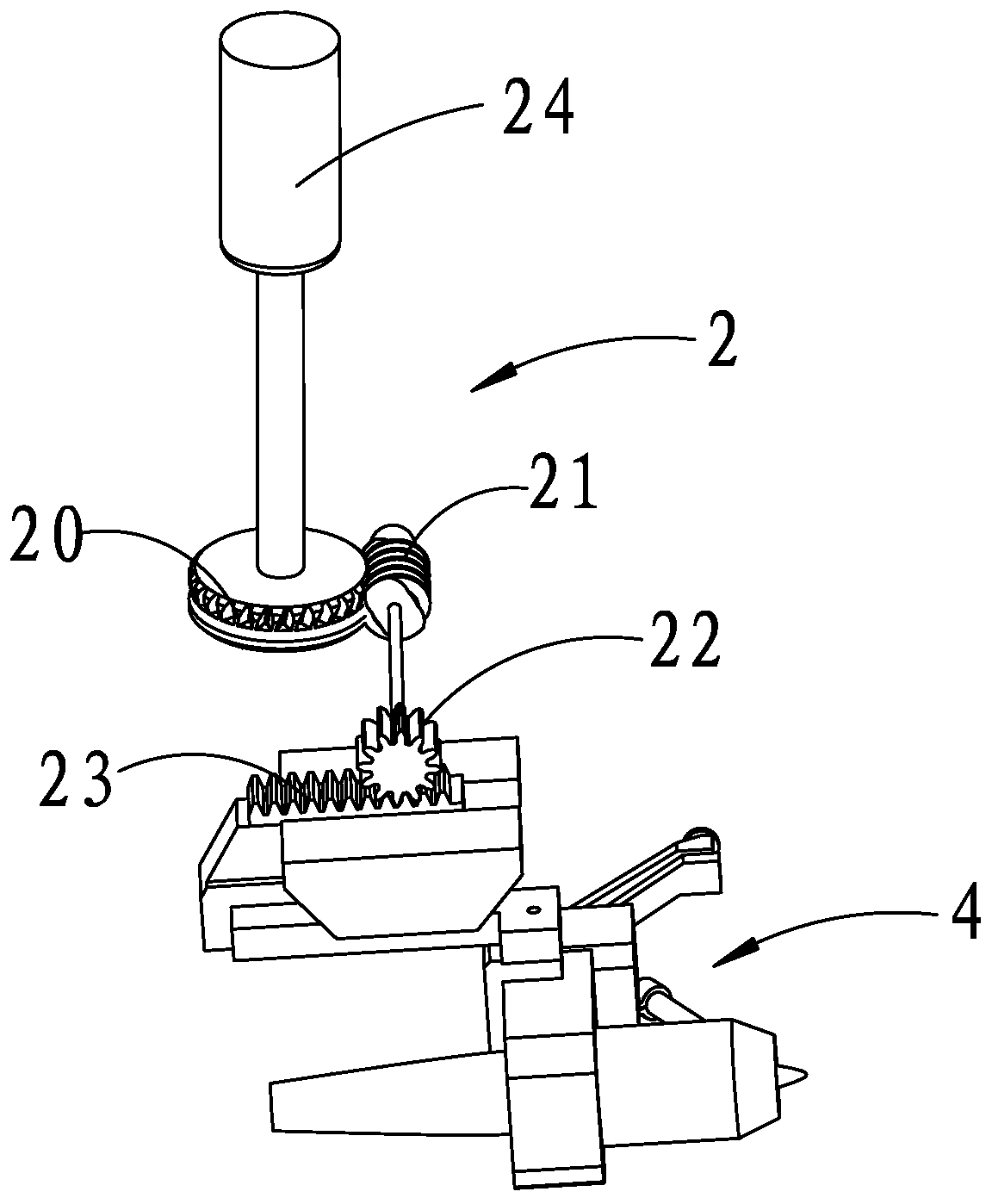
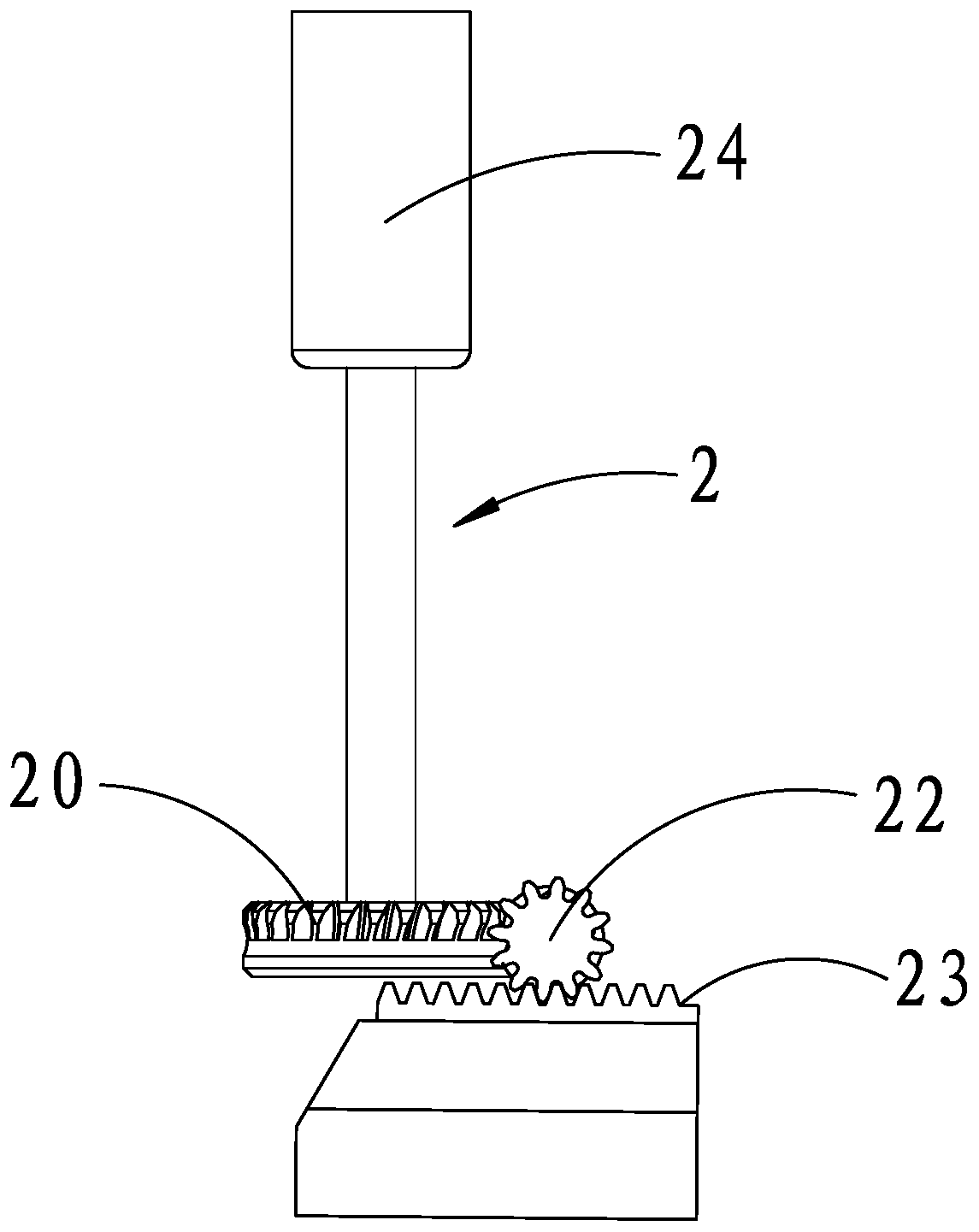
[0037] In this example: if Figure 2-4 As shown: the welding robot also includes a displacement a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More