

Road scene semantic segmentation method based on full residual cavity convolutional neural network
A convolutional neural network and semantic segmentation technology, applied in the field of road scene semantic segmentation based on full residual hole convolutional neural network, can solve the problems of rough restoration effect information, reduced image feature information, and unrepresentativeness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] The present invention will be further described in detail below in conjunction with the embodiments of the drawings.
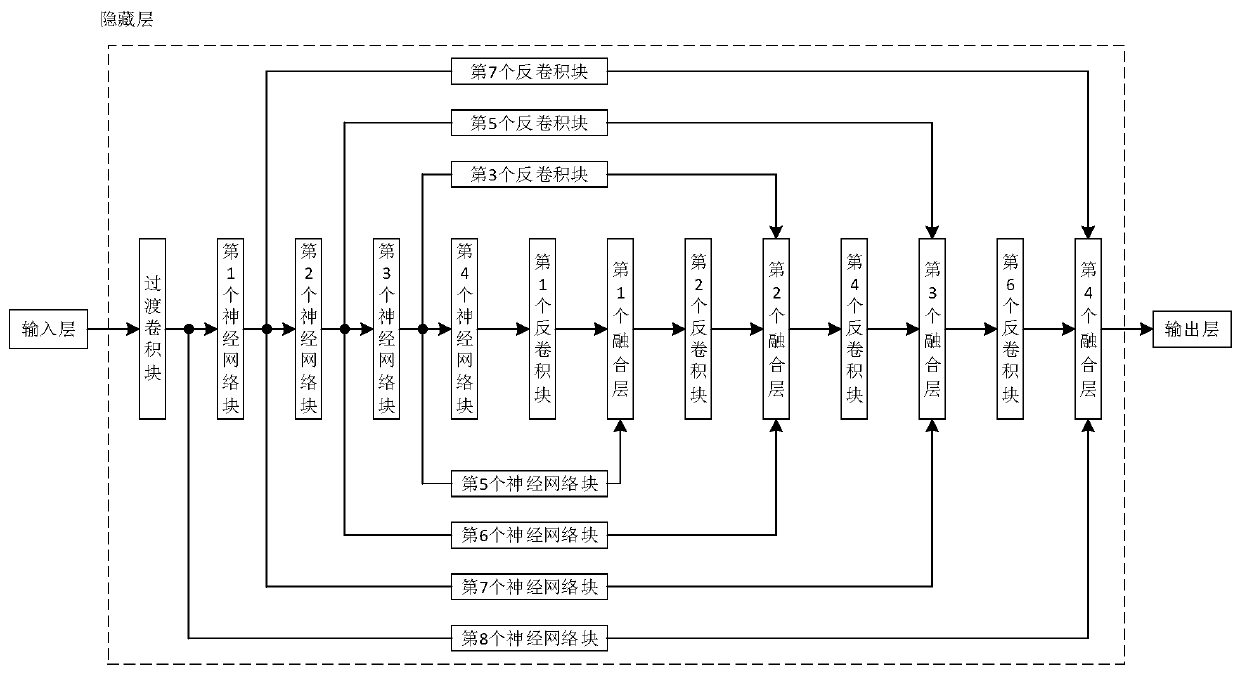
[0041] The present invention proposes a road scene semantic segmentation method based on a full residual hole convolutional neural network, which includes two processes, a training phase and a testing phase.
[0042] The specific steps of the training phase process are:
[0043] Step 1_1: Select Q original road scene images and the real semantic segmentation images corresponding to each original road scene image to form a training set, and mark the qth original road scene image in the training set as {I q (i,j)}, combine the training with {I q (i,j)) The corresponding real semantic segmentation image is recorded as Then, the existing one-hot encoding technology (one-hot) is used to process the real semantic segmentation image corresponding to each original road scene image in the training set into 12 one-hot encoding images, and The set of processed 12 one-ho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More