

Unmanned helicopter control optimization method based on particle swarm algorithm
A technology of unmanned helicopters and particle swarm algorithm, applied in computing, artificial life, computing models, etc., can solve problems such as heavy workload, and achieve the effects of flexible use, improved robustness, and simple design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the embodiments of the present invention.
[0047] This case will be fully understood by the following examples, so that those skilled in the art can complete it, and other embodiments may include structural, logical, process and other changes.
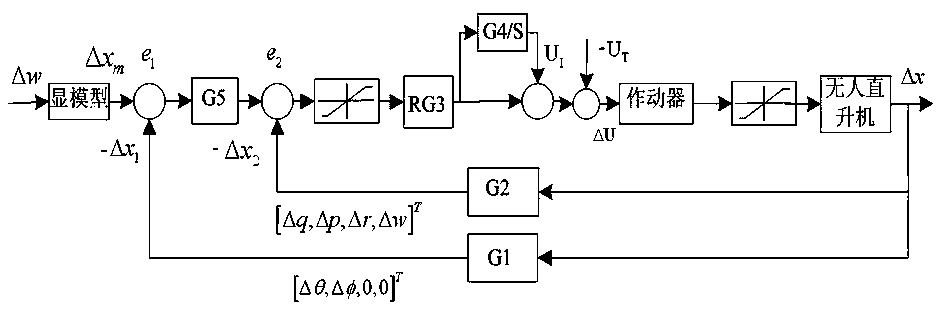
[0048] In order to solve the disadvantage of relying on expert experience in the selection of forward gain diagonal matrix R and integral constant matrix G4 in explicit model tracking control in the prior art, the example of the present invention provides a control optimization method based on particle swarm optimization algorithm. Including the following steps:
[0049] Step 1. Design the display models of the four channels according to the unmanned helicopter model
[0050] The linear model of an unmanned helicopter is
[0051]
[0052] The state quantity and the control quantity are resp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More