

Pose identifying and grabbing device and method based on binocular vision
A binocular vision, pose technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of not considering the initial and final attitude of the product, and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
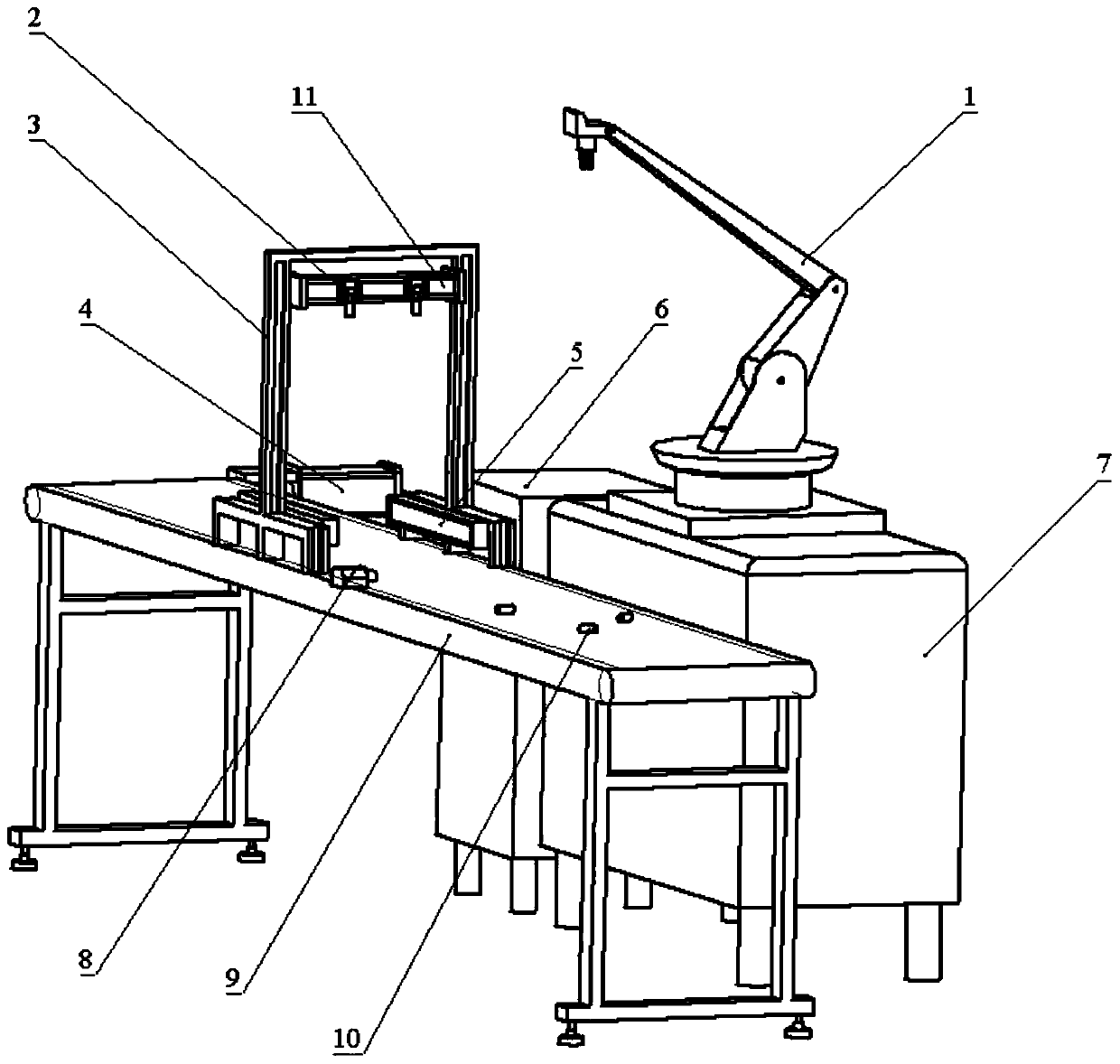
[0055] Specific implementation methods (such as image 3 and Figure 4 shown):
[0056] Such as Figure 5 The gray coordinate system (X, Y, Z) shown is the camera coordinate system, and the two black two-dimensional coordinate systems are the pixel coordinate system (x, y) of the left and right cameras respectively. The pixel coordinate system of the left camera is located at At (0,0,0) of the camera coordinate system, the pixel coordinate system of the right camera is located at (Tx,0,0) of the camera coordinate system. (X, Y, Z) in the figure is a point in the camera coordinate system.
[0057] Such as Figure 6 Shown is the workpiece coordinate system, which is established based on the center of the bottom circle of the target workpiece.
[0058] Such as Figure 7 Shown is the coordinate system of the manipulator, established with the origin of the center of the manipulator base.
[0059] Step 1: by adjusting the height of the industrial camera 2, the shooting angle ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More