

Sea cucumber autonomous identification and grabbing method based on deep learning and binocular positioning
A deep learning, sea cucumber technology, applied in character and pattern recognition, image data processing, instruments, etc., can solve the problems of low recognition and detection accuracy, poor robustness, ignorance of complexity and variety, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0106] The present invention will be further described below in conjunction with the drawings.
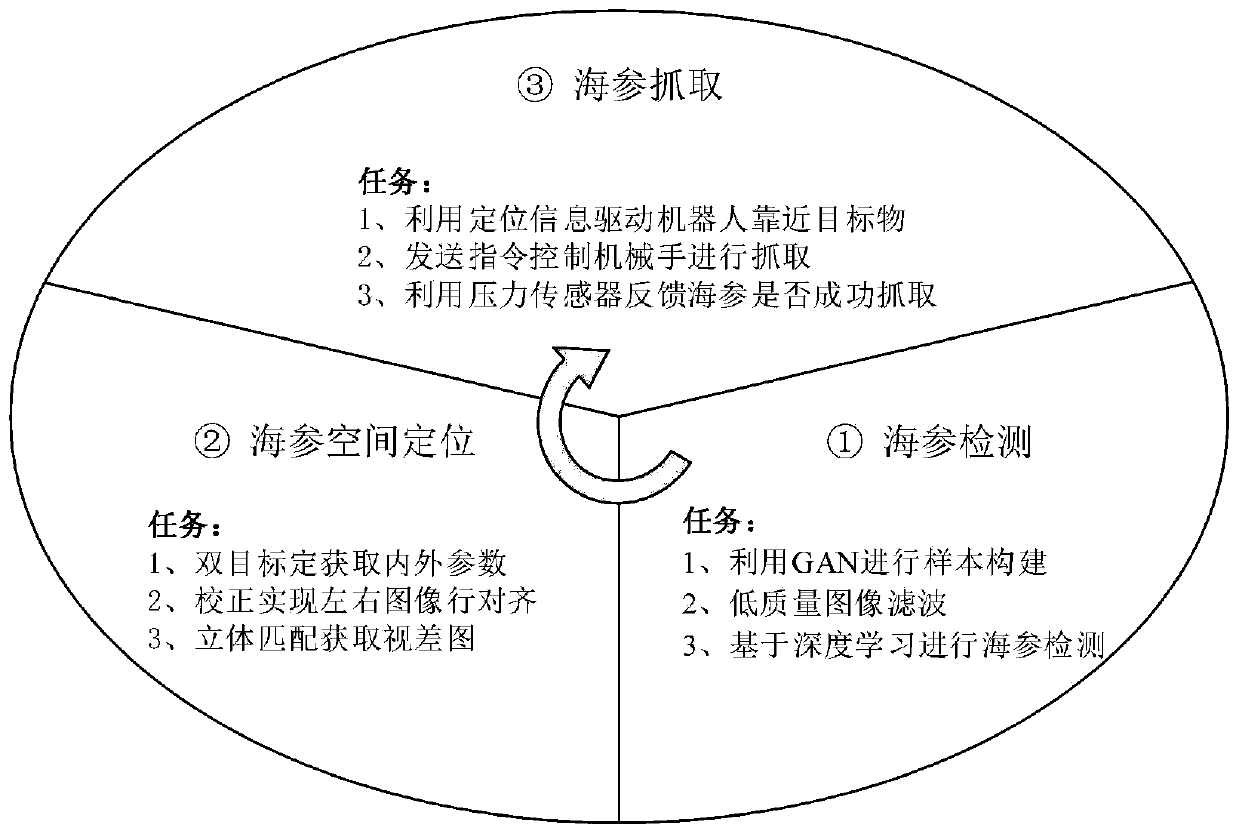
[0107] A method for autonomous identification and capture of sea cucumbers based on deep learning and binocular positioning. The flowchart is as follows figure 1 As shown, it mainly includes sea cucumber detection, sea cucumber spatial positioning and sea cucumber capture.
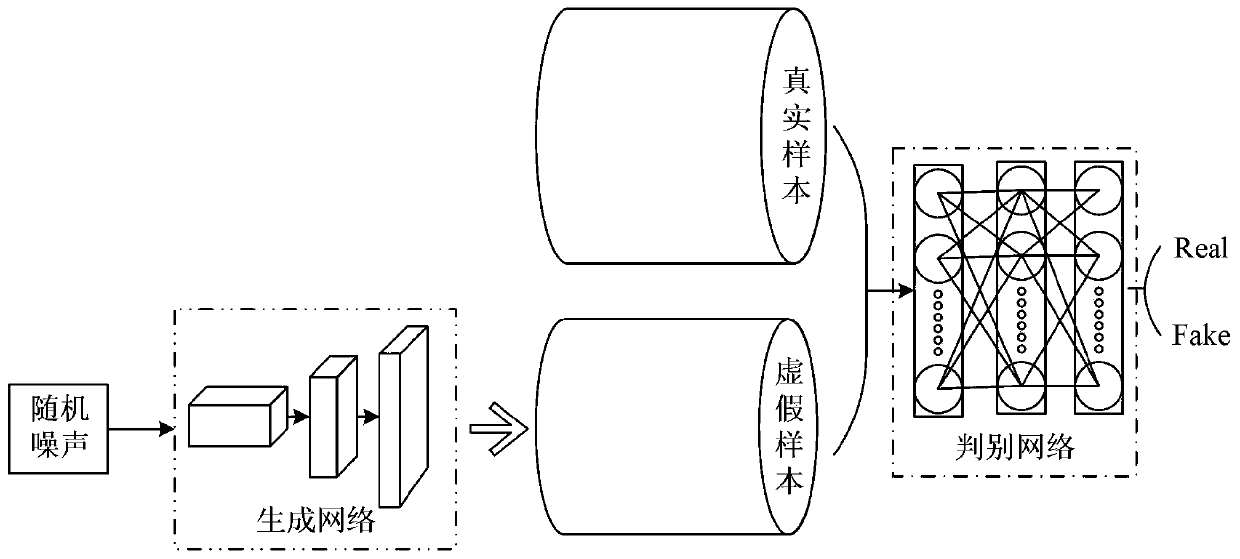
[0108] 1. In the sea cucumber capture step, first use the GAN model to construct the sea cucumber sample, using such as figure 2 As shown in the GAN model, the generation network obtains false samples through learning and induction of random noise, and inputs the false samples and real samples to the discriminant network for judgment, so as to realize the enhancement of sea cucumber sample data. The present invention is measured by the value of confidence The probability of sea cucumbers in the detected area is high or low. The value of confidence is calculated by deep learning. The greater the value of confidence,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More