

Smart PID control method
A control method and intelligent technology, applied in the field of PID control, can solve the problems of PID gain change sensitivity, poor anti-disturbance ability, irreconcilability, etc., and achieve the effect of good dynamic quality, strong anti-disturbance ability, and small calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
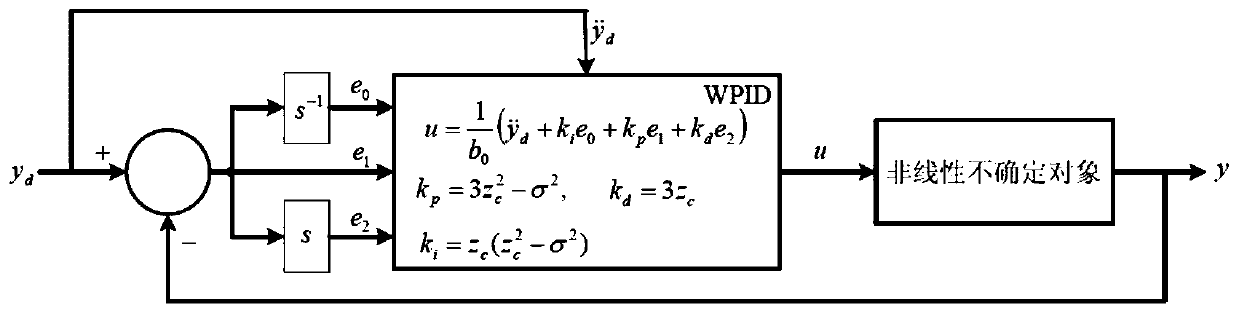
[0025] The specific implementation manners of the present invention will be described in detail below in conjunction with the accompanying drawings and examples.
[0026] 1. Mapping ideas from nonlinear uncertain system model to sum disturbance model
[0027] Suppose a second-order nonlinear uncertain system model is:
[0028]
[0029] Among them, y 1 ,y 2 ∈R is the two states of the system, u∈R is the control input of the system; f(y 1 ,y 2 ,t) and g(y 1 ,y 2 ,t) is an uncertain smooth function of the system, and g(y 1 ,y 2 ,t) is a non-negative function; d is the external disturbance; y is the system output;
[0030] Define the unknown sum perturbation state (also called the expansion state) y 3 for:
[0031] the y 3 =f(y 1 ,y 2 ,t)+d+g(y 1 ,y 2 ,t)u-b 0 u (2)
[0032] Equation (1) can be rewritten as the following perturbation system:
[0033]
[0034] Among them, b 0 ≠0 is determined by the non-linear uncertain non-negative function g(y 1 ,y 2 ,t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More