

Estimation method for position and attitude of cooperative target
A technology of cooperative goals and attitudes, which can be applied to measurement devices, electromagnetic wave re-radiation, and utilization of re-radiation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be further elaborated below by describing a preferred specific embodiment in detail in conjunction with the accompanying drawings.
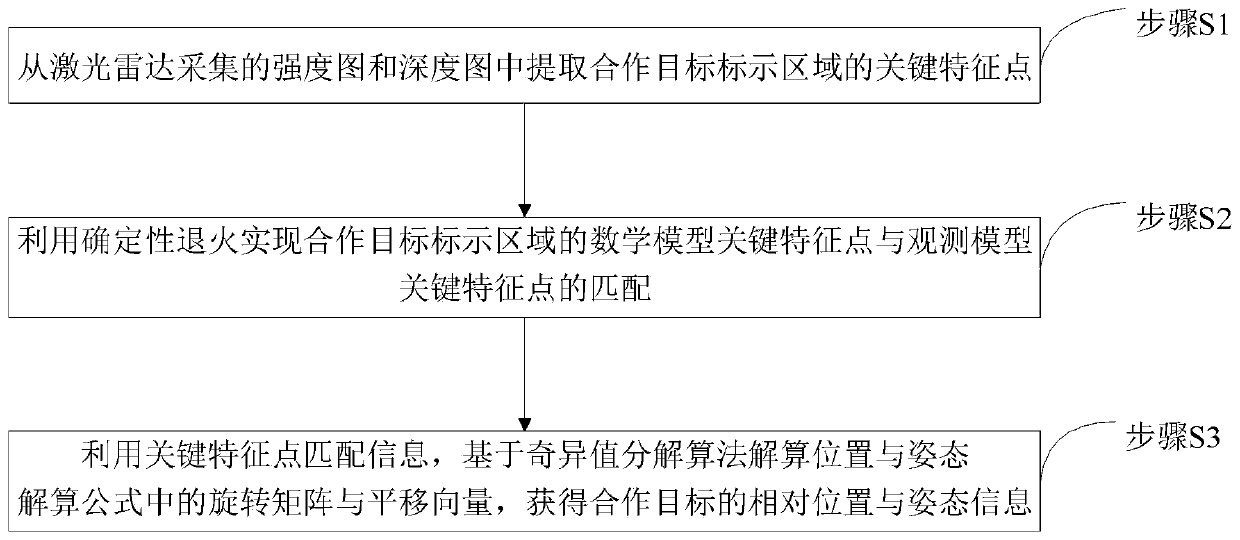
[0061] Such as figure 1 As shown, the present invention provides a method for estimating the position and attitude of a cooperative target, comprising the following steps:
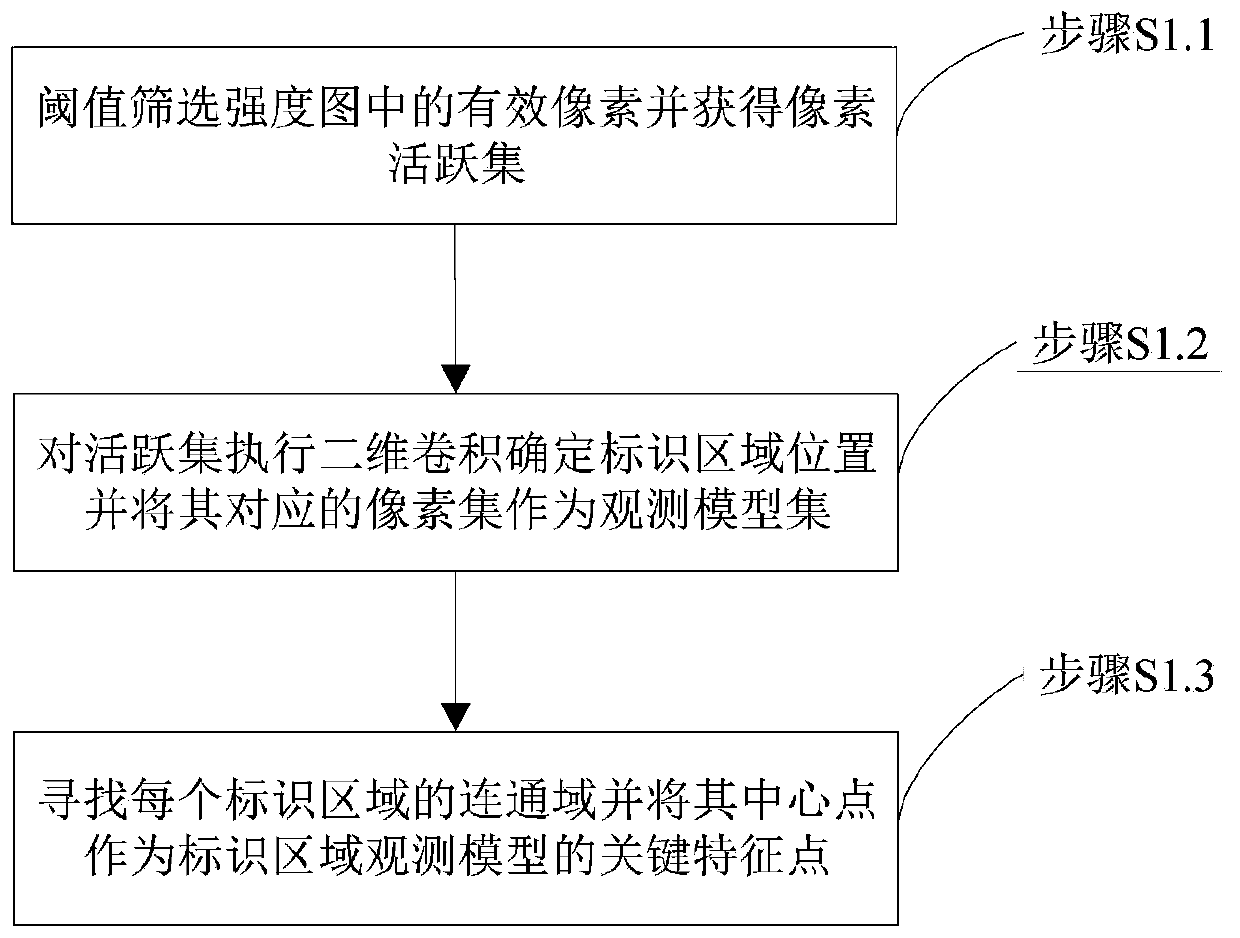
[0062] S1. Extract the key feature points of the marked area of the cooperative target from the intensity map and depth map collected by the lidar;
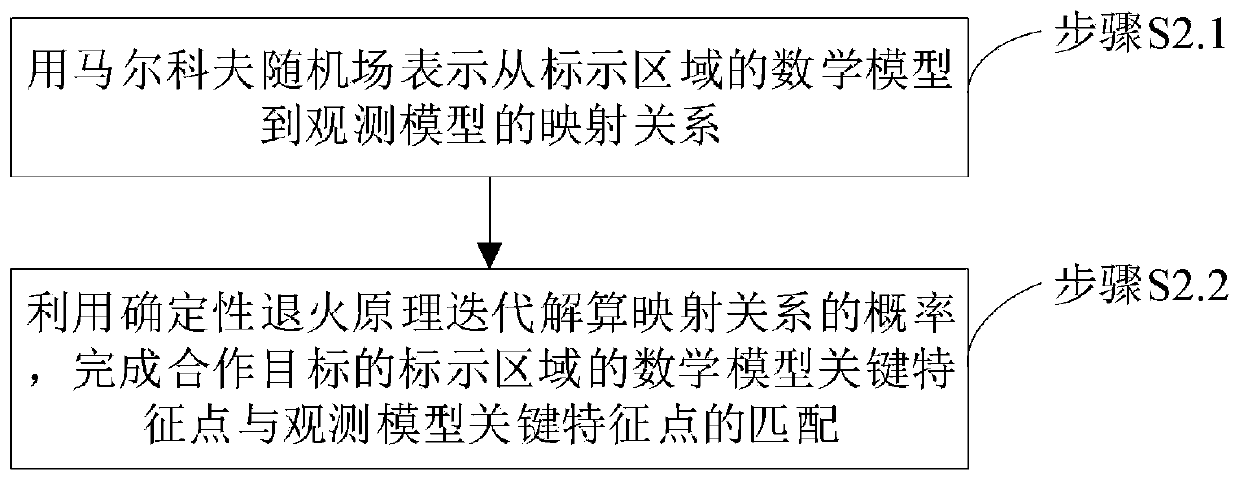
[0063] S2. Use deterministic annealing to match the key feature points of the mathematical model of the cooperation target marked area with the key feature points of the observation model;
[0064] S3. Using the key feature point matching information, calculate the rotation matrix and translation vector in the position and attitude calculation formula based on the singular value decomposition algorithm, and obtain the relative position and attitude information of the cooperation target.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More