

Mechanical gripper mechanism for transfer robot
A technology for handling robots and manipulators, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of poor grasping stability, large operating space, inconvenient grasping, etc., and achieve convenient grasping, reasonable layout, and stable grasping. solid effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
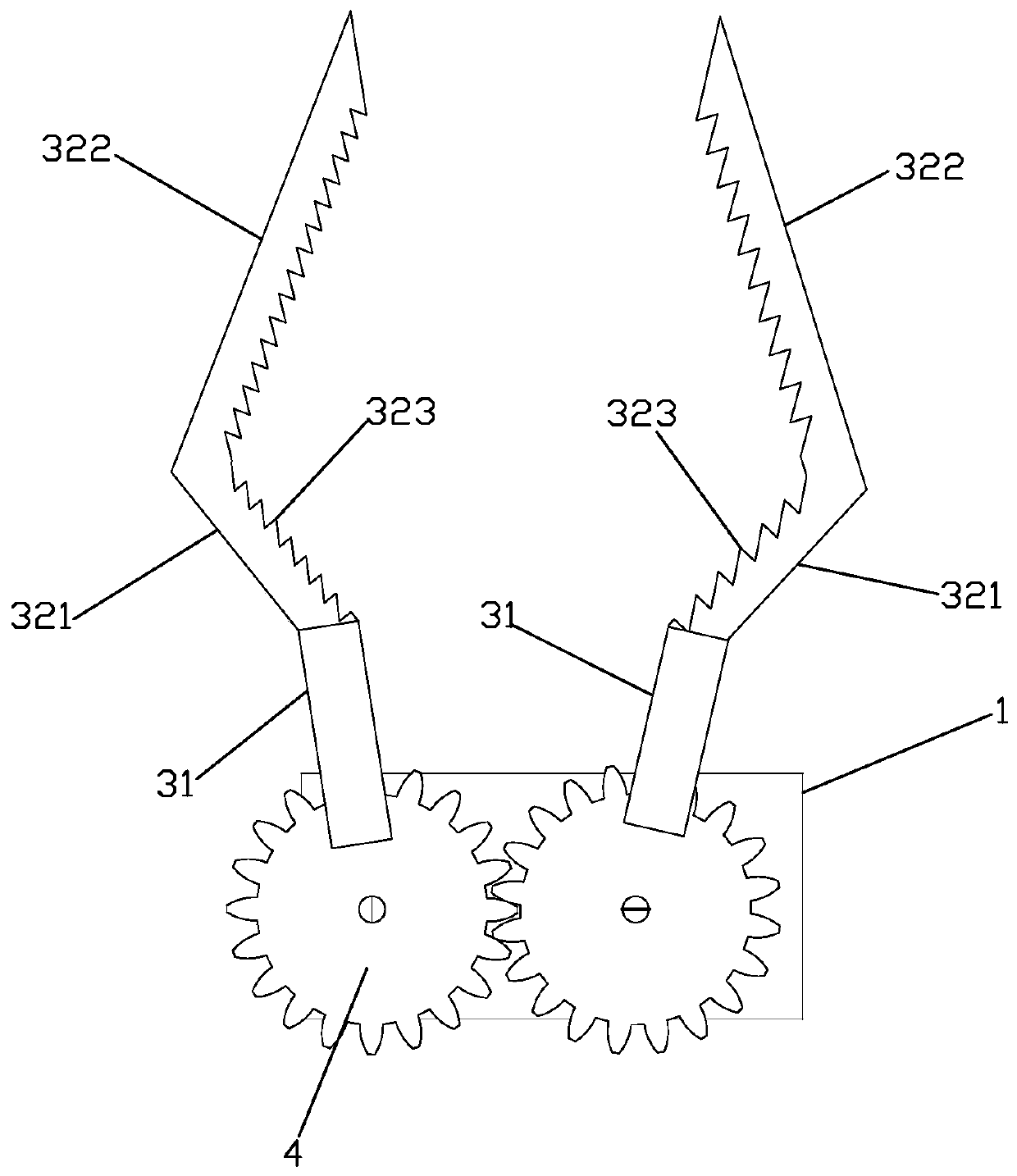
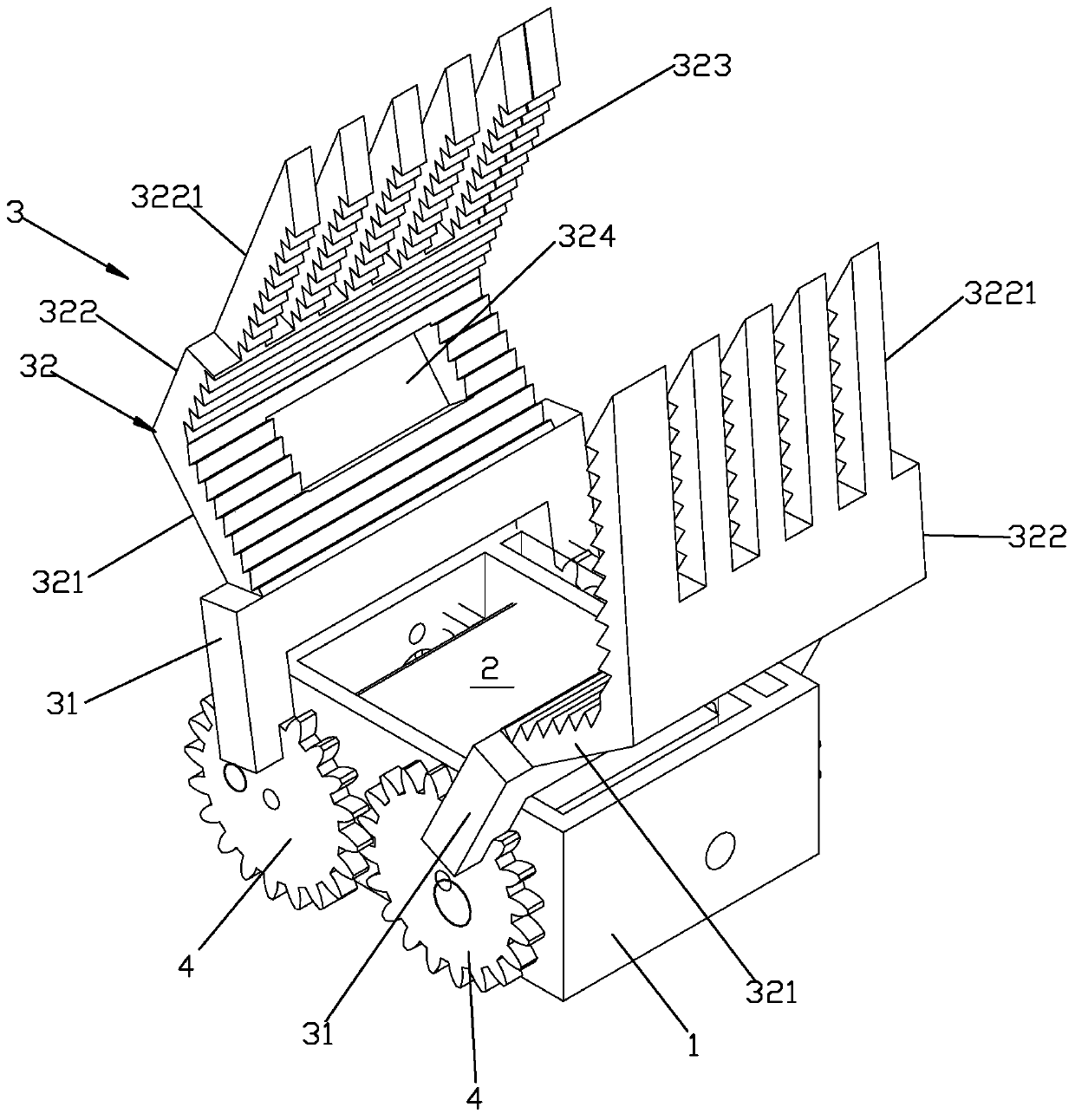
[0020] Please check Figure 1 to Figure 3 , the mechanical claw mechanism of the transport robot includes a mounting part 1, a steering gear 2 installed in the mounting part 1 and a mechanical claw unit. The steering gear 2 is such as a MAXES09MD digital steering gear (torque: 2.6Kg.cm), and the steering gear has a power output shaft, and the installation part 1 is, for example, a motor frame.
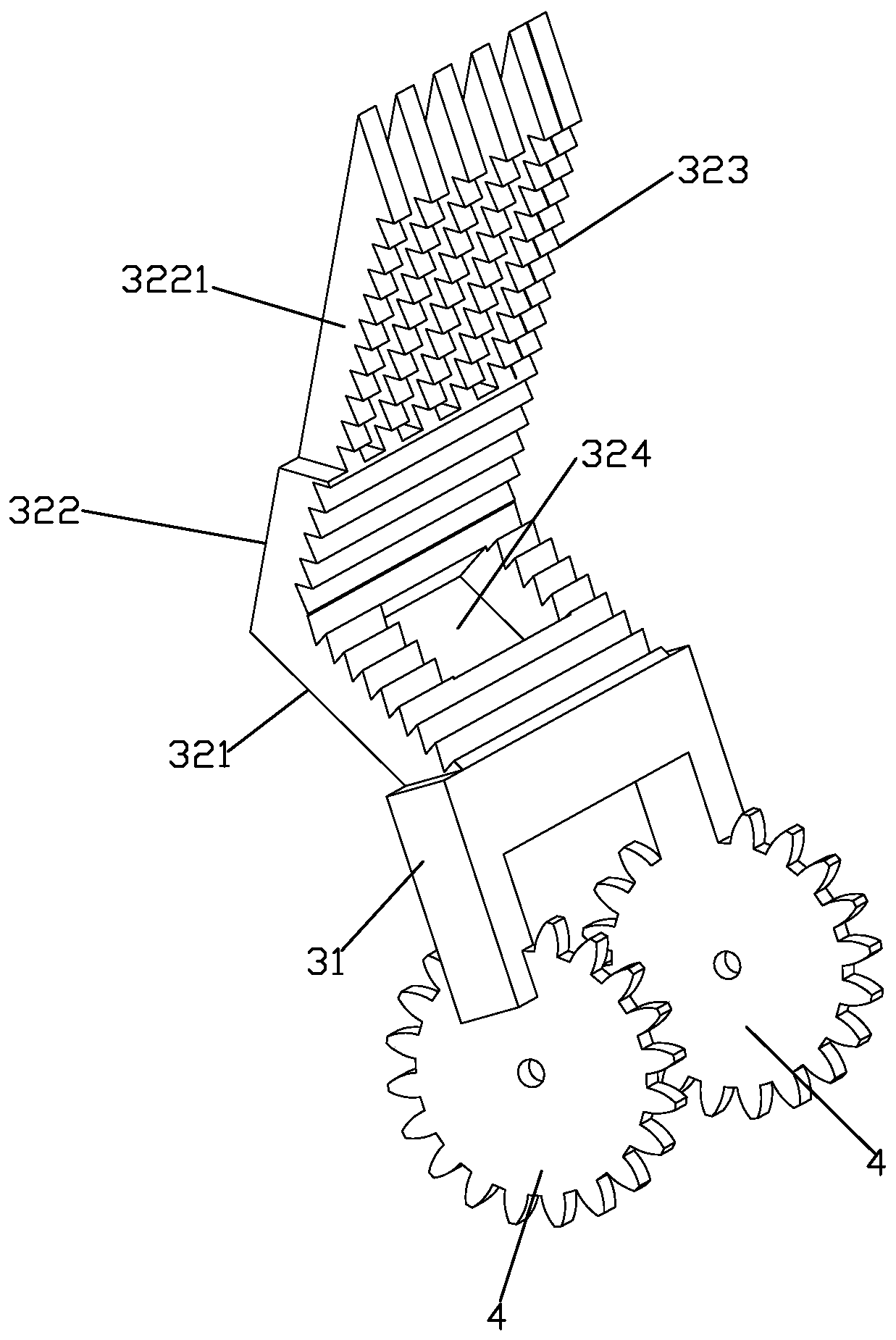
[0021] The manipulator claw unit includes two meshed gear parts, and the two gear parts are arranged side by side on the installation part 1 so as to be rotatable, and each gear part is eccentrically fixed with a claw 3 . The gear part includes two coaxially spaced and fixed gears 4 . The claw 3 includes a U-shaped frame 31 and a claw portion 32. The U-shaped frame 31 has a middle rod and two side rods respectively fixed on both sides of the middle rod. The claw portion 32 is fixed on the U The middle rod of the shaped frame 31; the U-shaped frame 31 clamps the installation part 1, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More