

Autonomous path planning method of live-line working robot based on point cloud
A technology of path planning and live work, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as obstacle collisions, achieve the effects of reducing the amount of computation, solving poor real-time performance, and improving utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
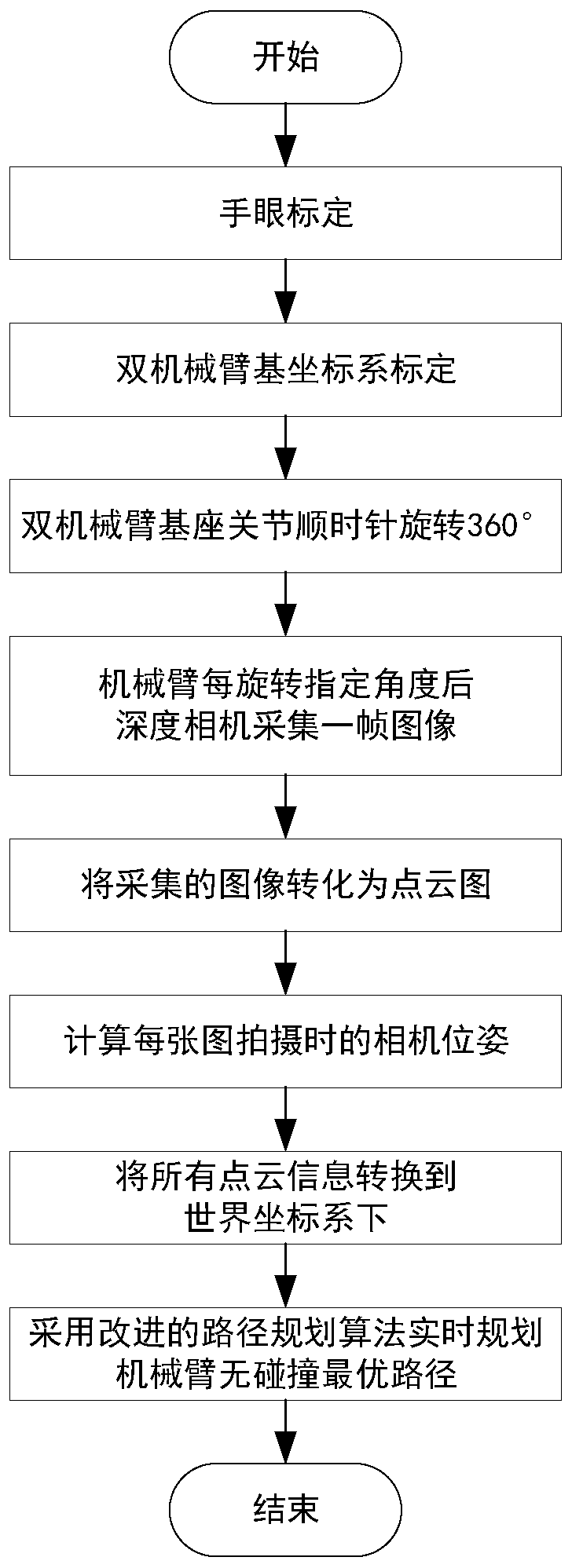
[0018] combine figure 1 , the present invention is based on a point cloud live working robot autonomous path planning method, comprising the following steps:
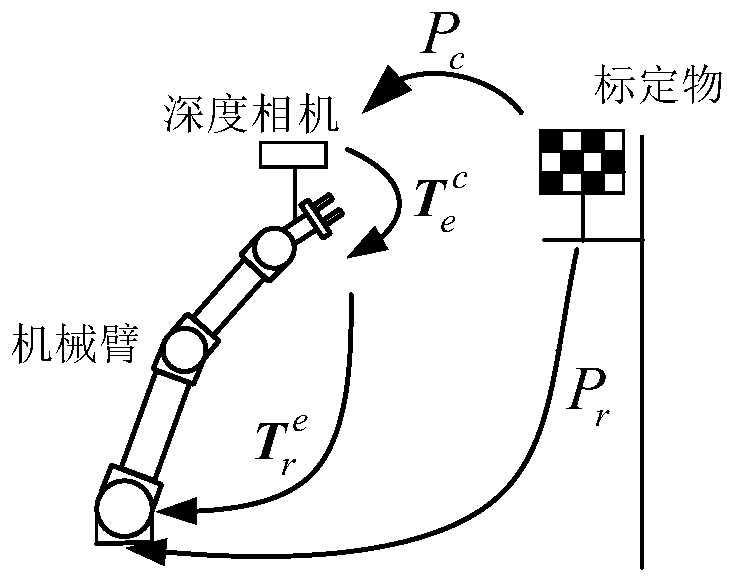
[0019] Step 1. Install and fix a depth camera at the end of the dual mechanical arms of the live working robot;
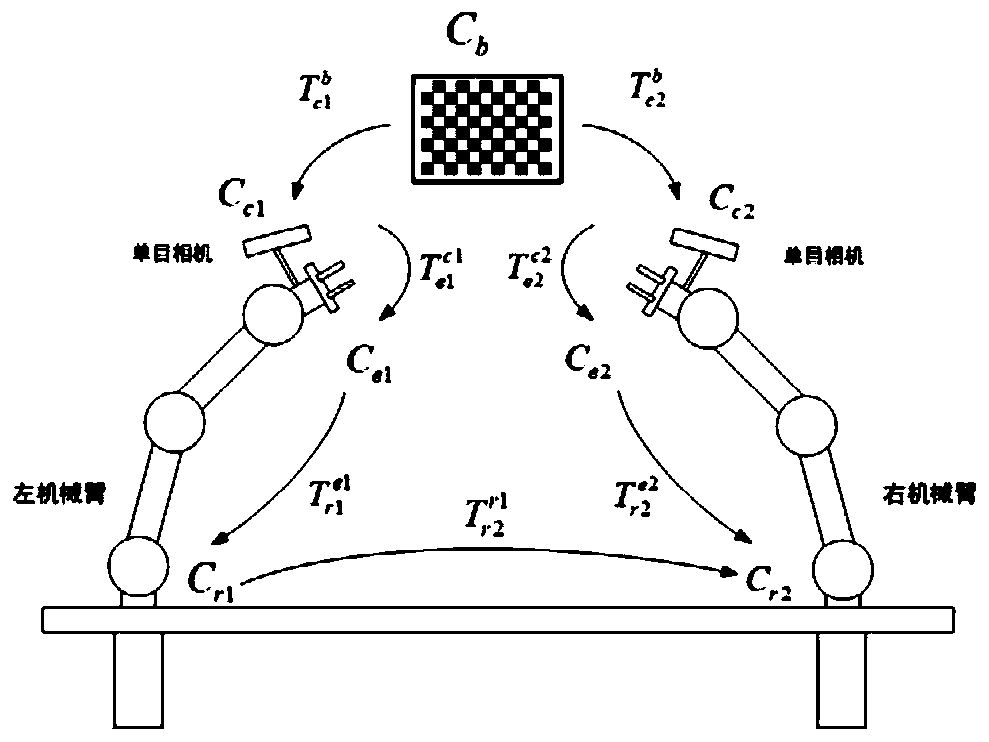
[0020] Step 2. Carry out hand-eye calibration and dual-arm base coordinate system calibration to share the field of view of the two depth cameras;
[0021] Step 3. Control the base joints of the dual robotic arms to rotate 360°, and the depth camera collects a frame of image every time θ° is rotated to obtain the environmental information in the current field of view;
[0022] Step 4. Splicing the images collected in step 3 to obtain the complete environmental information of the working space of the manipulator, that is, the position coordinate information of obstacles in the work space in the world coordinate system; where the world coordinate system is the position coordinate information of a certain mani...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More