

A Multi-Agent Fully Distributed Active Disturbance Rejection Time-varying Formation Control Method
A multi-agent and control method technology, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems that formation control is difficult to realize, the calculation complexity increases, and formation control cannot be distributed, so as to reduce the Risk of Jitter, Accurate Estimation and Compensation, Beneficial Effects on Performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described below in conjunction with the accompanying drawings and simulation experiments.
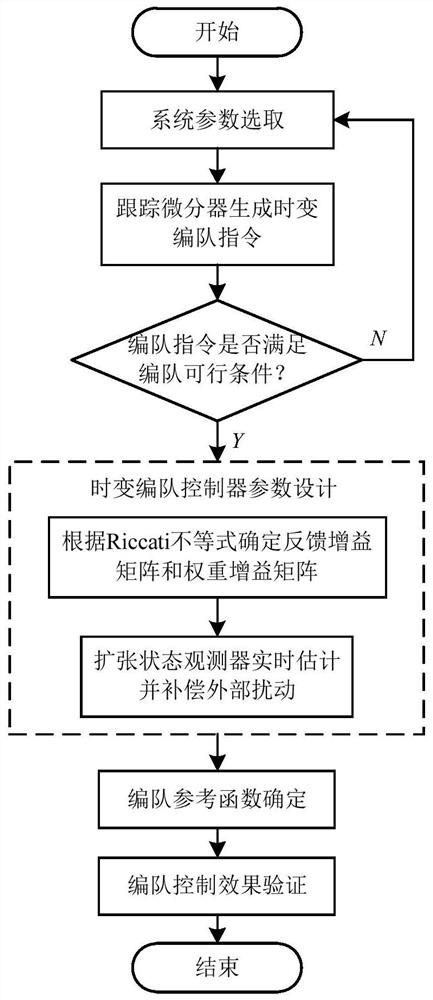
[0058] The present invention provides a multi-agent fully distributed active disturbance rejection time-varying formation control method, which includes the following contents:
[0059] 1. System dynamics model and time-varying formation controller
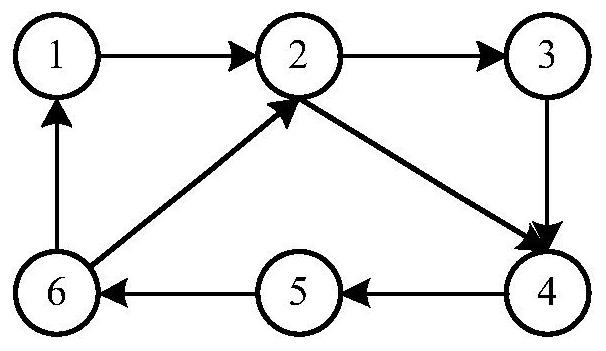
[0060] For a second-order multi-agent system composed of N autonomous second-order isomorphic agents, the dynamic model of the ith (i∈{1,2,…,N}) agent can be described as follows:
[0061]
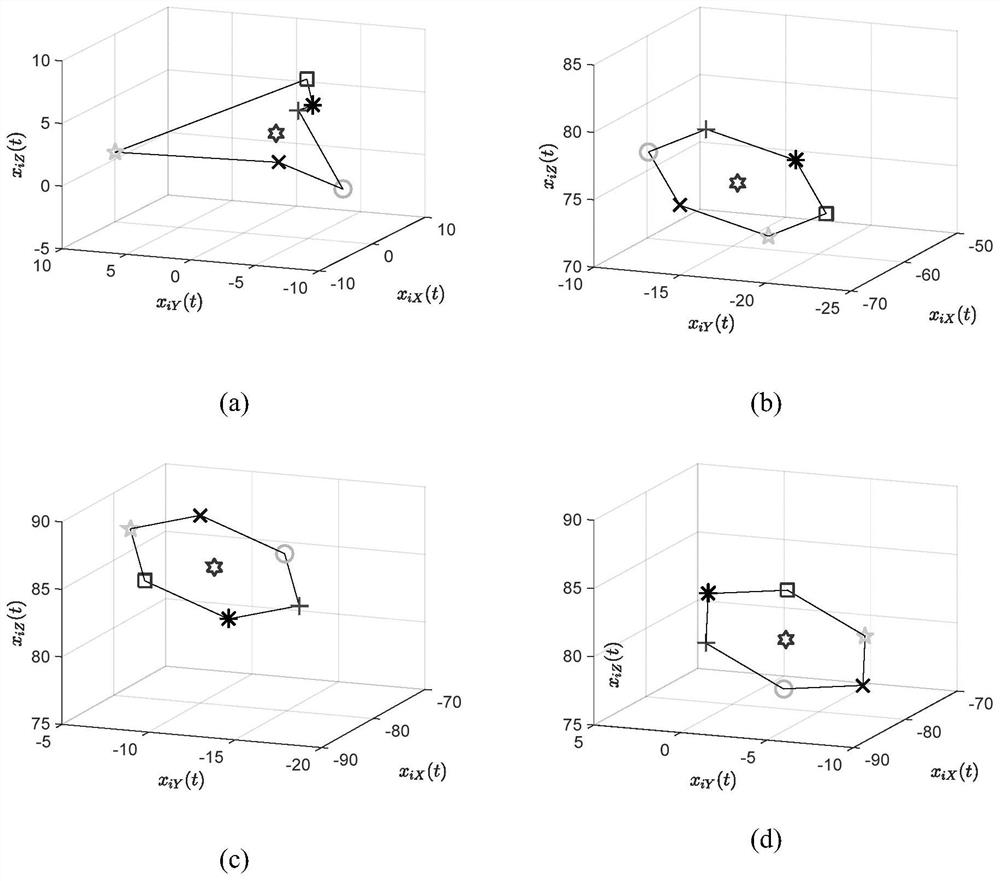
[0062] where x i (t), v i (t), u i (t) and d i (t) are n-dimensional vectors, representing the position, velocity, control input and external disturbance of agent i, σ x and σ v Indicates the damping parameter. vector is the expected time-varying formation for a multi-agent system, where the expected ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More