

Industrial manipulator
A technology of industrial manipulators and mechanical grippers, applied in manipulators, manufacturing tools, chucks, etc., can solve problems such as stator falling on the ground, weak stator clamping, economic loss, etc., to strengthen the support effect and improve the clamping effect. , the effect of reducing economic losses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
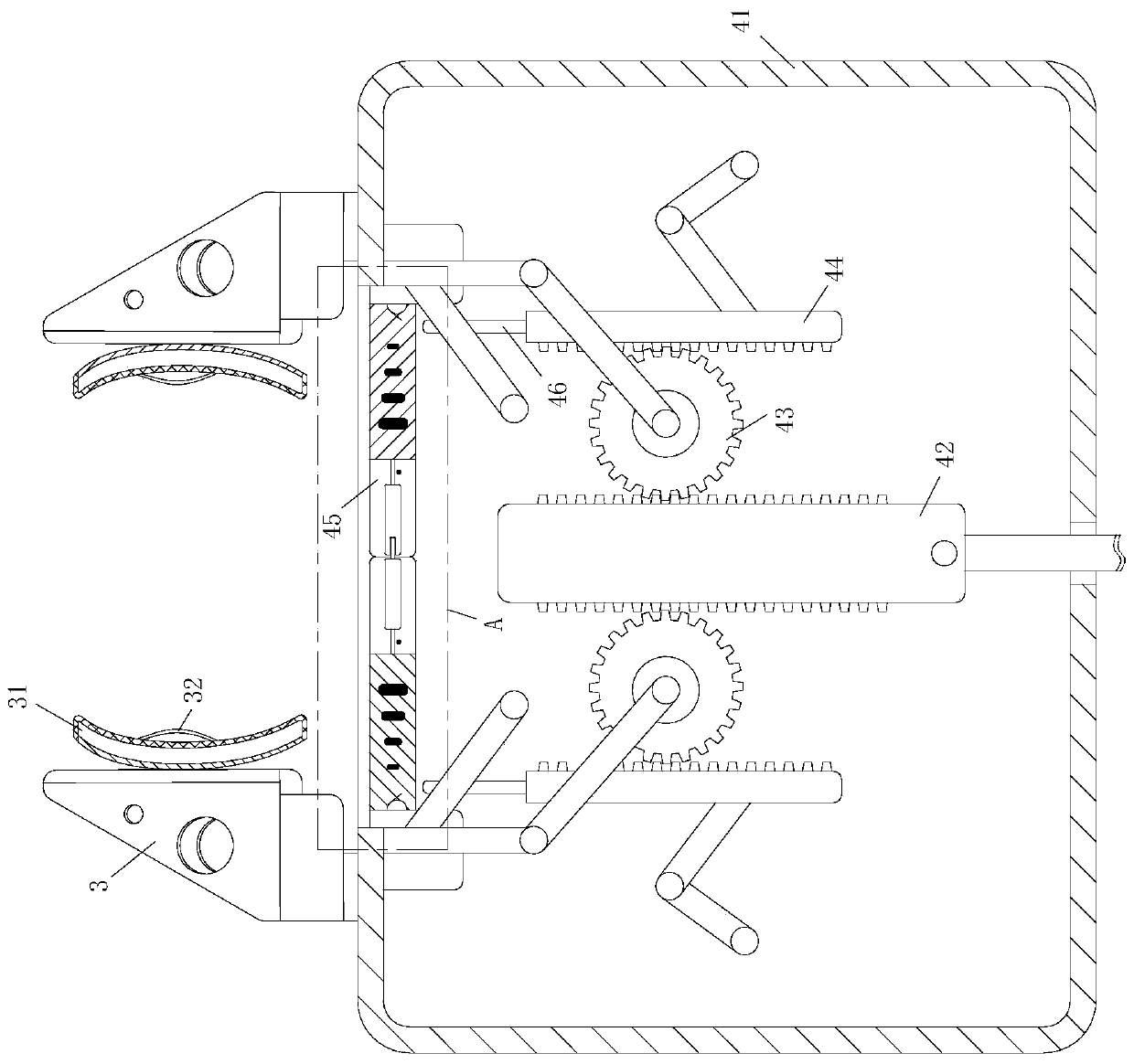
[0023] As an embodiment of the present invention, the inner surface of the mechanical gripper 3 is provided with an arc-shaped air bag 31, and the side of the arc-shaped air bag 31 close to the mechanical gripper 3 is made of hard rubber material. The side of the arc-shaped airbag 31 away from the mechanical gripper 3 is made of elastic rubber material, and the inner surface of the arc-shaped airbag 31 is connected with an arc-shaped extrusion plate 32; When clamping, the stator squeezes the extrusion plate 32 connected to the inner surface of the arc-shaped airbag 31, so that the extrusion plate 32 squeezes the connected arc-shaped airbag 31, so that the gas in the middle of the airbag 31 is squeezed to The two sides of the airbag 31, and the side of the airbag 31 close to the mechanical gripper 3 is made of hard rubber material, and the side of the airbag 31 away from the mechanical gripper 3 is made of elastic rubber material, so that the inner side of the airbag 31 is made ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More