

Gaussian process model-based predictive control method for multi-variable nonlinear dynamic system model
A Gaussian process model, nonlinear dynamic technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problems of complex controller design, increased controller calculation, complex training process, etc. Improved nonlinear processing capability, time-saving control problems, and easy parameter optimization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
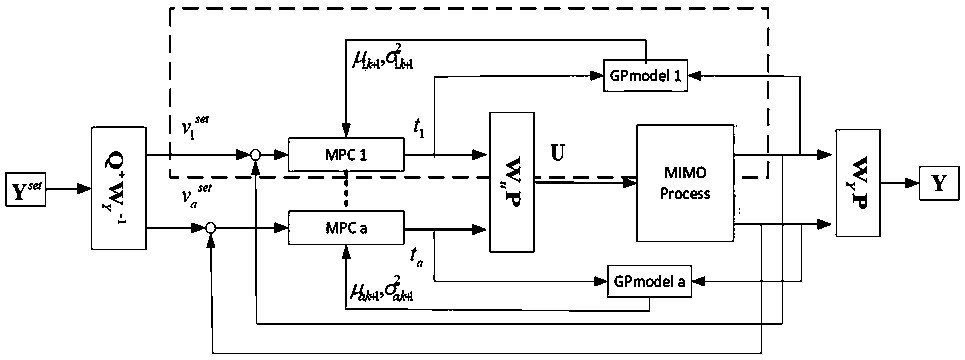
[0038] like Figure 1 to Figure 7 Shown, the present invention proposes a kind of model predictive control (MPC) scheme based on Gaussian process (GP) model under dynamic partial least squares (PLS) framework, is applied to multivariable nonlinear dynamic system; The present invention uses Gaussian process The process is a nonlinear prediction model, which not only has simple modeling, fewer parameters, and easier training of hyperparameters, but also can obtain the predicted output value, and the variance information also reflects the prediction accuracy. Moreover, multi-step prediction based on single-step prediction has a simple method, and can obtain better prediction results while reducing the time complexity of prediction model training; for multiple-input multiple-output (MIMO) systems, in order to eliminate the Cross-coupling, avoiding decoupling control and loop pairing, reducing the complexity of calculation, decoupling the multiple-input multiple-output (MIMO) syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More