

Method and system for finding position of capsule endoscope
A technology of capsule endoscopy and relative positional relationship, which is applied in medical science, diagnosis, diagnostic recording/measurement, etc. It can solve problems such as the inability to determine the position of capsule endoscopy, and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
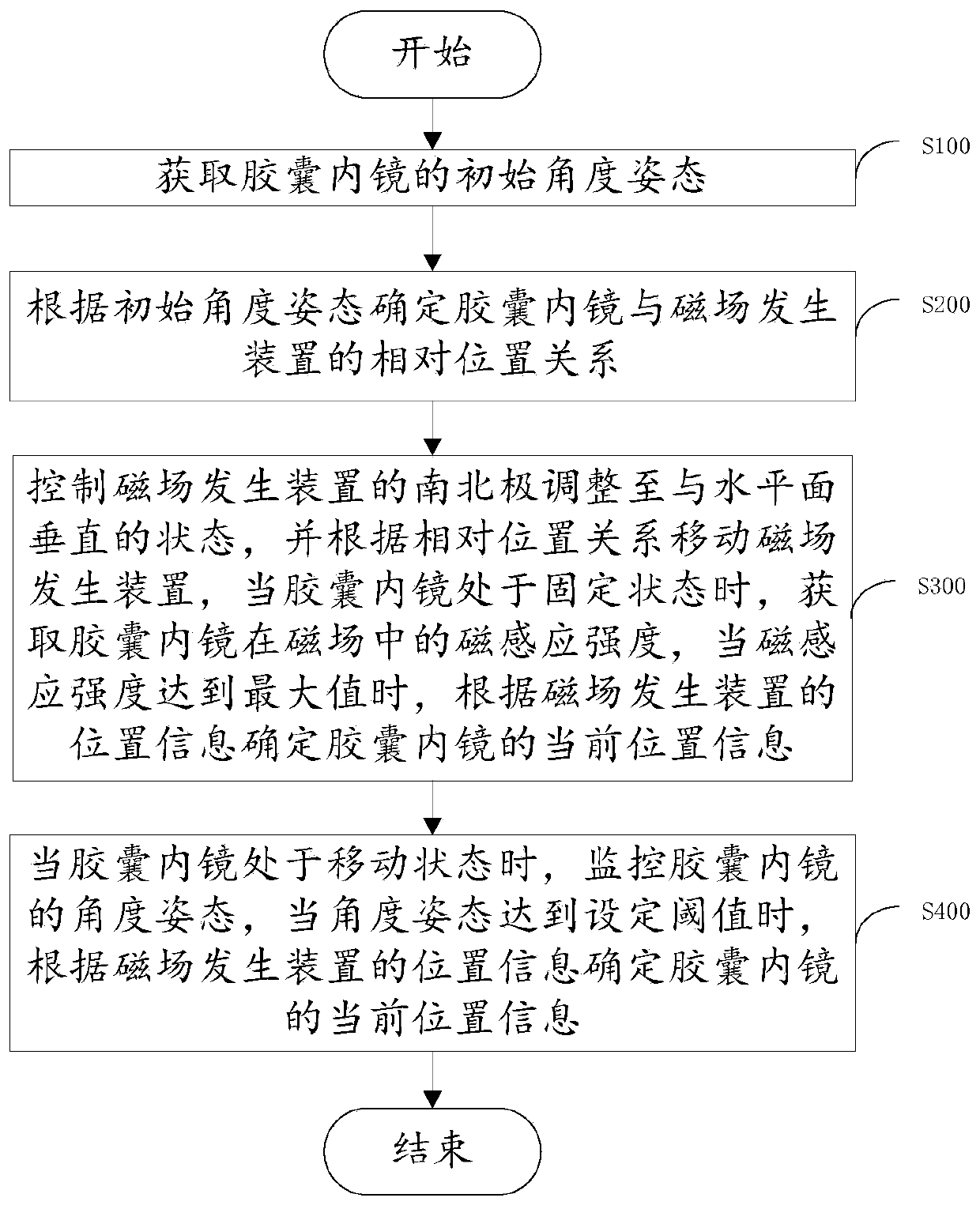
[0062] Please see figure 1 , figure 1 It is a flow chart of a method for finding a position of a capsule endoscope provided in an embodiment of the present application. The method can be used to find the capsule endoscope 600 in a fixed state or a moving state in the patient's body, and the method can be applied to a computer control system. The method specifically may include the following steps:
[0063] Step S100: Obtain the initial angle posture of the capsule endoscope 600;
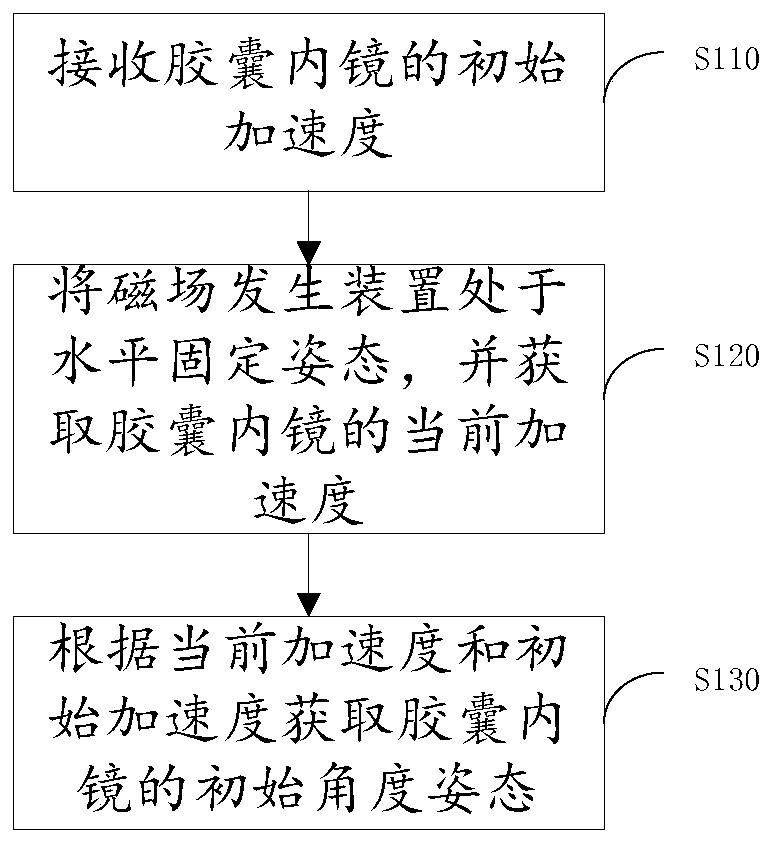
[0064] Such as figure 2 As shown, it is a specific flow chart of obtaining the initial angle posture of the capsule endoscope 600 provided by the embodiment of the present application. This step can specifically include:
[0065] Step S110: receiving the initial acceleration of the capsule endoscope 600;
[0066] As an example, in the above implementation process, an acceleration sensor is installed inside the capsule endoscope 600, and acceleration values of the capsule endoscope 600 in thr...
Embodiment 2
[0097] The embodiment of the present application also provides a position finding system for the capsule endoscope 600, such as Figure 7 As shown, it is a structural block diagram of the system for finding the position of the capsule endoscope 600 provided by the embodiment of the present application. This system can include but is not limited to:
[0098] Angle posture acquisition module 100, used to obtain the initial angle posture of the capsule endoscope 600;
[0099] The relative position determination module 200 of the capsule endoscope, configured to determine the relative positional relationship between the capsule endoscope 600 and the magnetic field generating device according to the initial angle posture;
[0100] The first position information determining module 300 is configured to control the north and south poles of the magnetic field generating device to adjust to a state perpendicular to the horizontal plane, and move the magnetic field generating device acc...
Embodiment 3
[0119] The embodiment of the present application also provides an electronic device, the electronic device includes a memory and a processor, the memory is used to store a computer program, and the processor runs the computer program so that the computer device executes the method described in Embodiment 1. The position finding method of the capsule endoscope described in any one.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More