

Three-wheel omnidirectional moving robot platform
An omnidirectional mobile and robotic technology, applied in the field of three-wheeled omnidirectional mobile robot platform, can solve the problems of large turning radius and few degrees of freedom of the chassis, and achieve the effect of small turning radius, many degrees of freedom, and reduced complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with accompanying drawing and example.
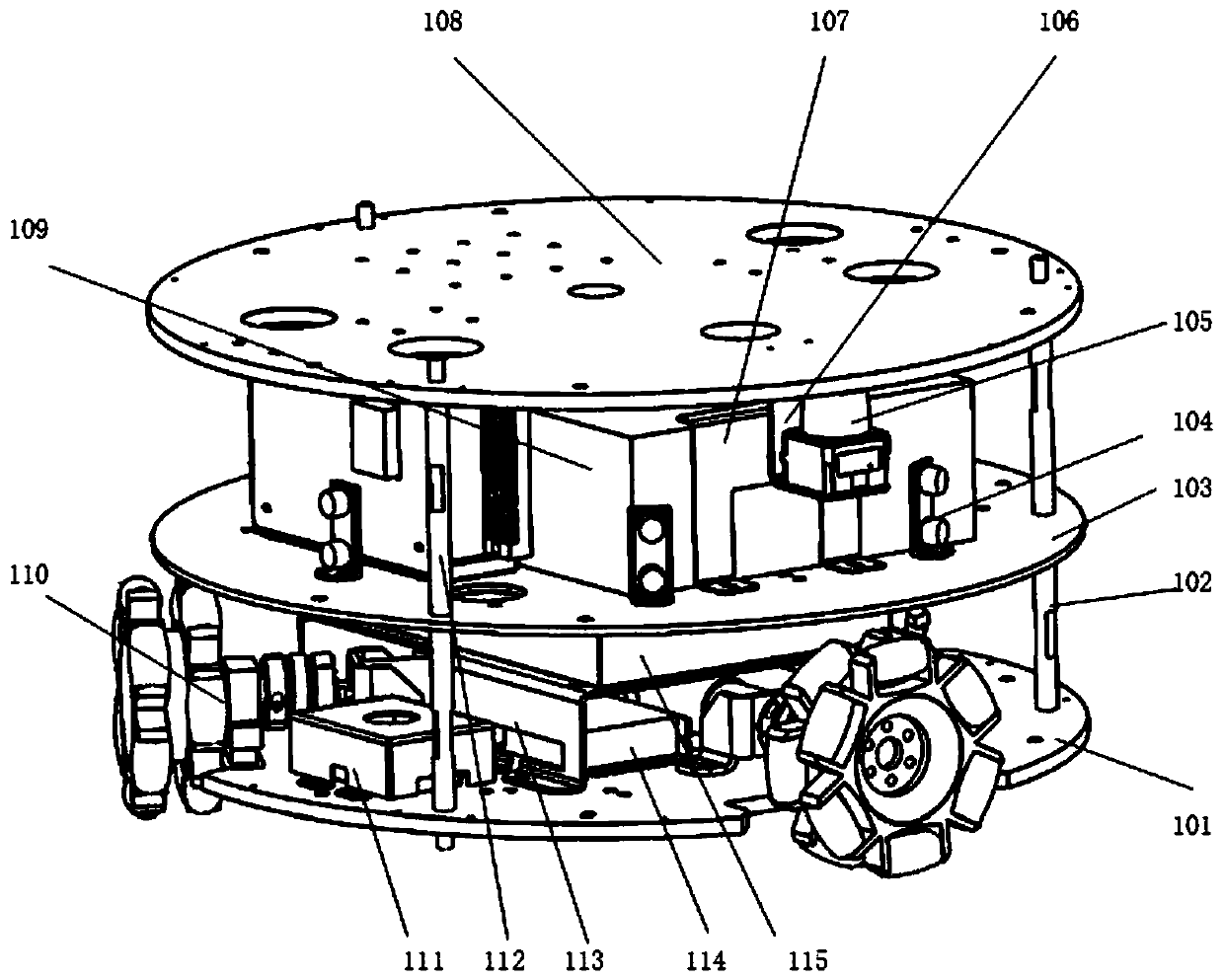
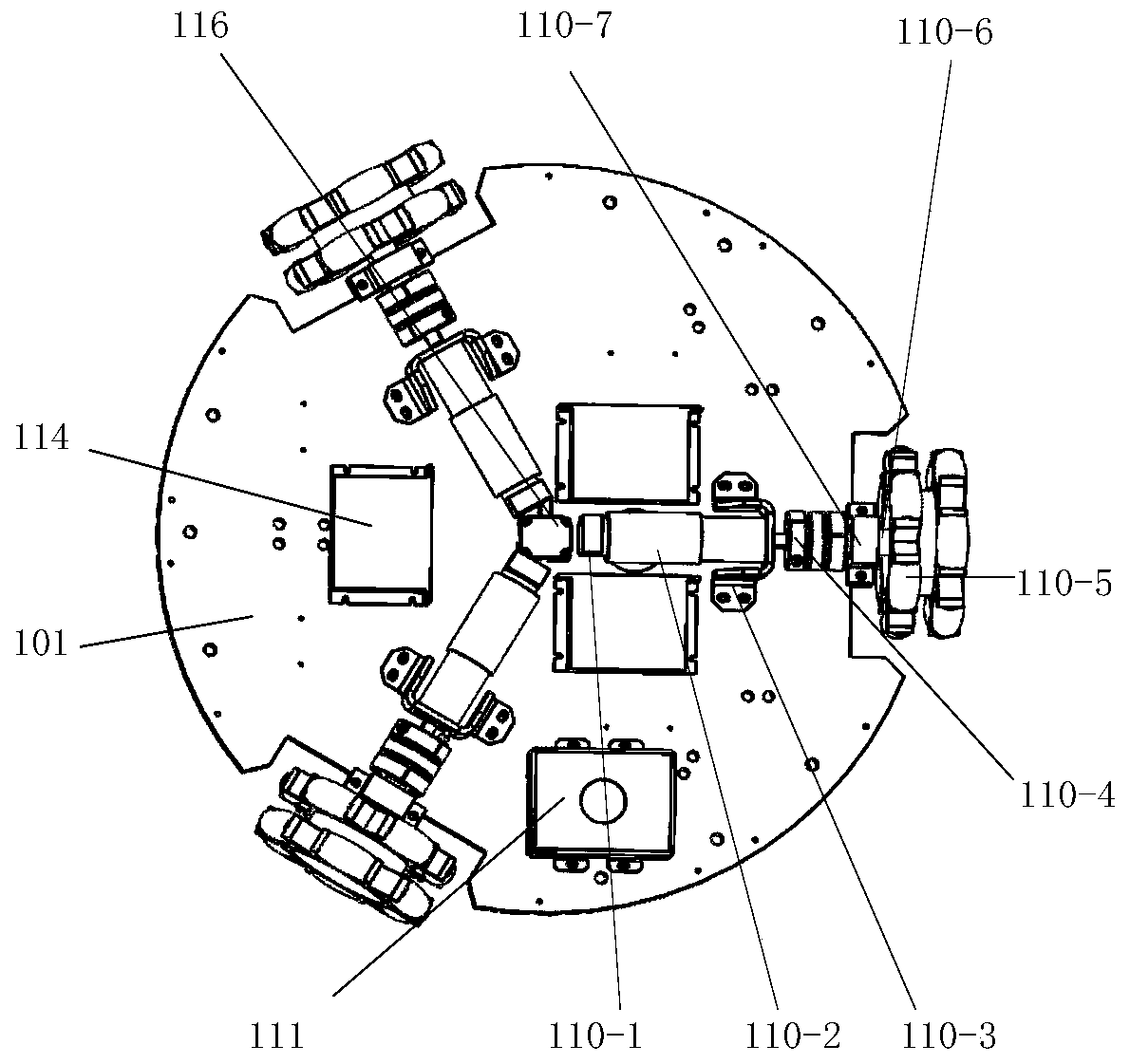
[0019] Such as figure 1 , figure 2 As shown, the omnidirectional mobile chassis 1 includes a lower mounting plate 101, a middle mounting plate 103, an upper mounting plate 108, a lower connecting column 102, an upper connecting column 112, a motor module 110, an ultrasonic sensor 104, and a laser distance measuring sensor 105 , inertial measurement unit 116 , 48V battery 109 , 12V battery 115 , controller 111 and 12V battery mounting plate 113 . The lower mounting plate 101, the middle mounting plate 103 and the upper mounting plate 108 are all circular plates, the lower mounting plate 101 and the middle mounting plate 103 are connected by three lower connecting columns 102, and the middle mounting plate 103 and the upper mounting plate 108 pass through Three upper connecting columns 112 are connected; there are three motor modules 110, which are installed on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More