

Emergency obstacle avoidance automatic-driving assistance torque calculation method based on intention of driver
A driver's intention and automatic driving technology, which is applied to the driver's input parameters, control devices, transportation and packaging, etc., can solve the problems of inability to effectively eliminate the impact of human-machine conflicts, inconvenience, and unstable data acquisition. Achieve the effect of realizing real-time control, eliminating man-machine conflict and ensuring precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0086] Specific embodiments of the present invention will be described below in conjunction with the accompanying drawings, so that those skilled in the art can better understand the present invention. It should be noted that in the following description, when detailed descriptions of known functions and designs may dilute the main content of the present invention, these descriptions will be omitted here.
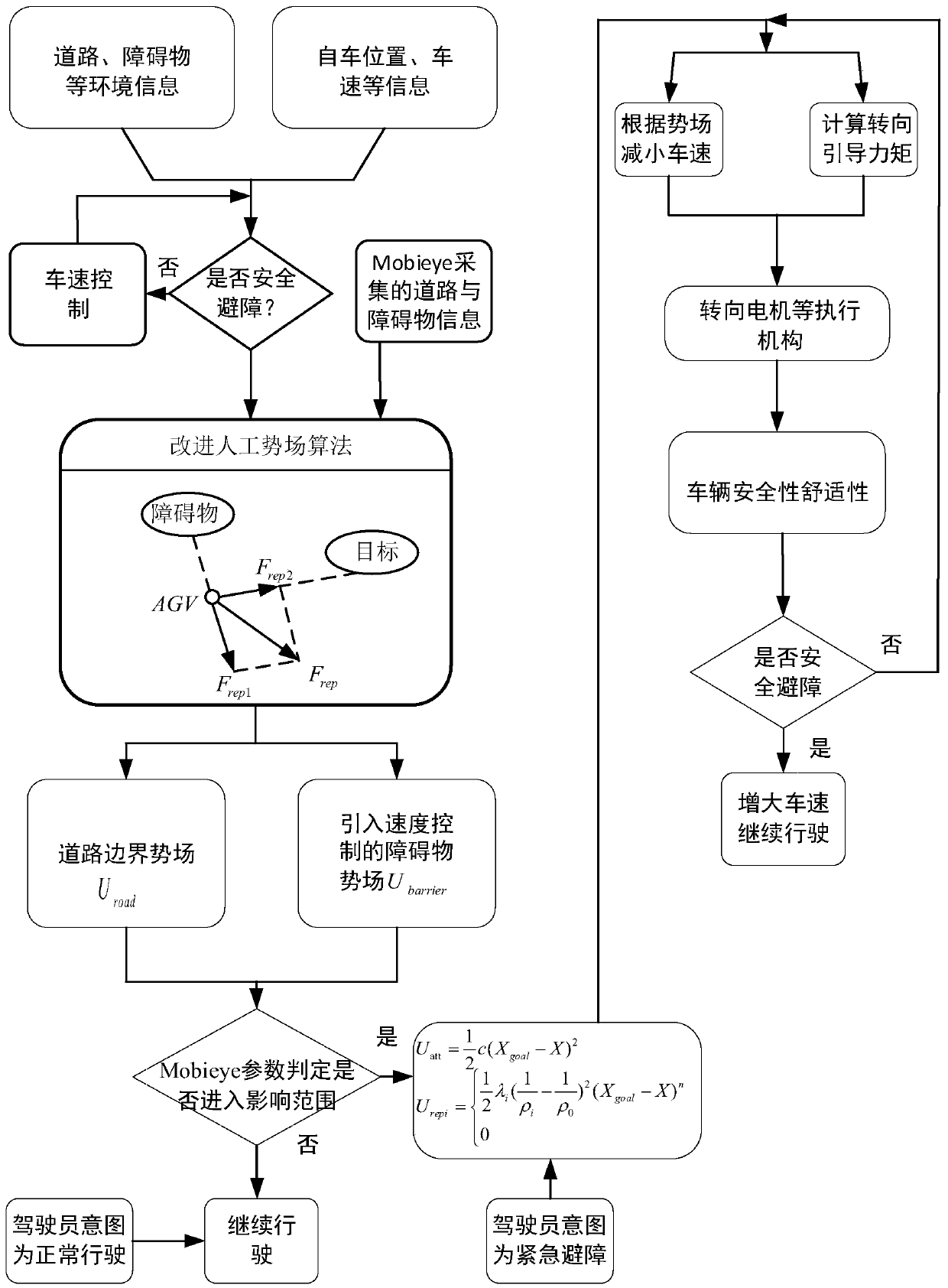
[0087] The calculation method of emergency obstacle avoidance automatic driving assistance torque based on the driver's intention is as follows: Figure 9 , with the following steps:
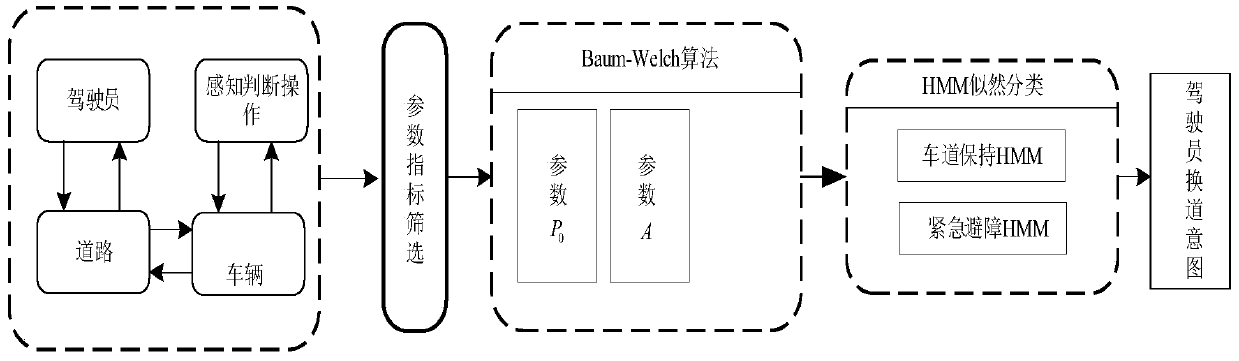
[0088] Step 1) Divide the driver's intention, and divide the driver's intention into two categories: normal driving and emergency obstacle avoidance;
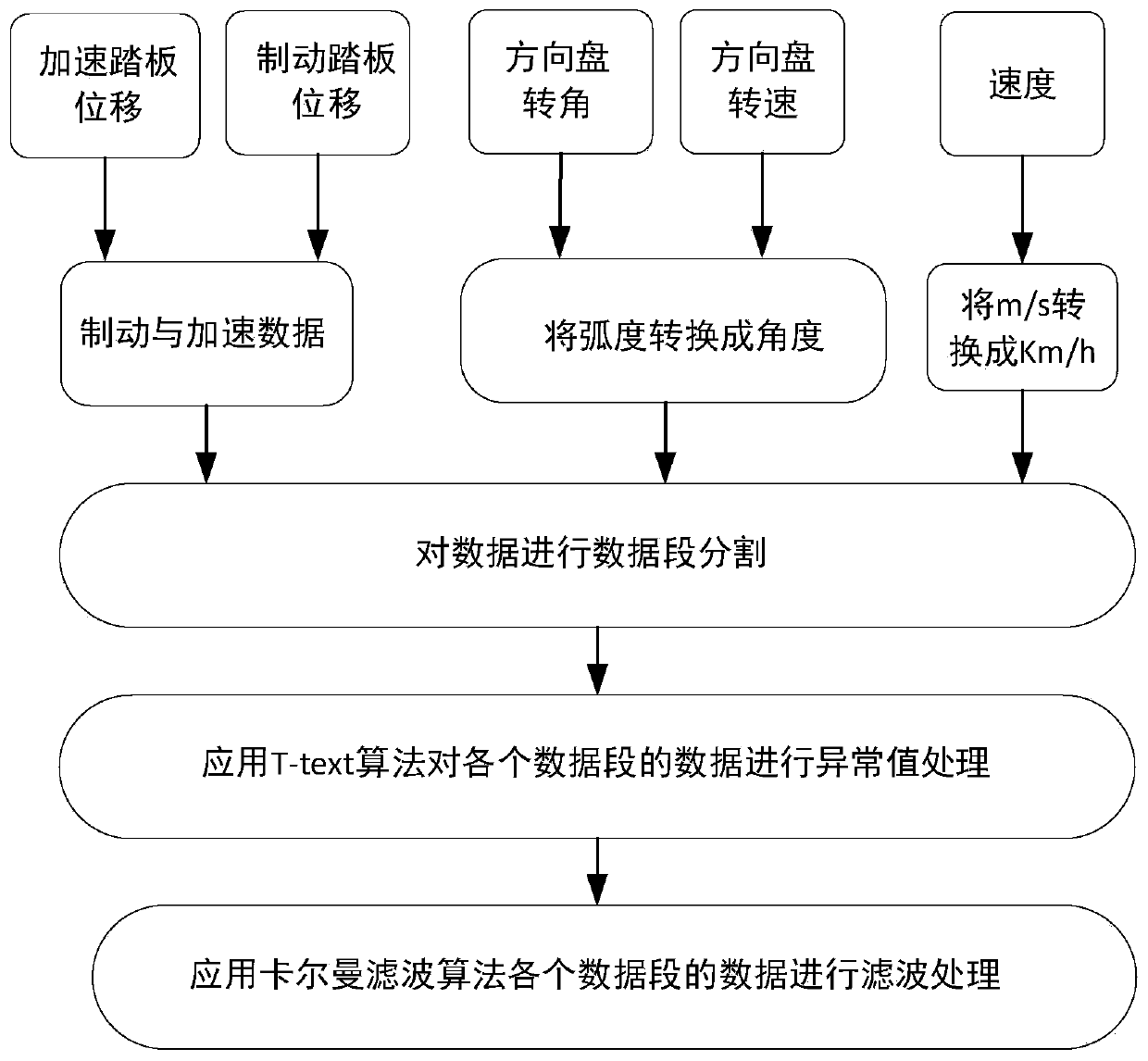
[0089] Step 2) Test data collection, using on-board sensors, aiming at different driving intentions of drivers, namely normal driving and emergency obstacle avoidance driving; collecting test data, including accelerator pedal stroke, brake pe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More