

Robot visual calibrating method based on perspective transformation model
A technology of robot vision and perspective transformation, applied in the field of robotics, can solve the problems of cumbersome calibration process, complex calibration process, and inability to meet the precision requirements of industrial robots, and achieve the effects of cost reduction, simple calibration process, and high calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
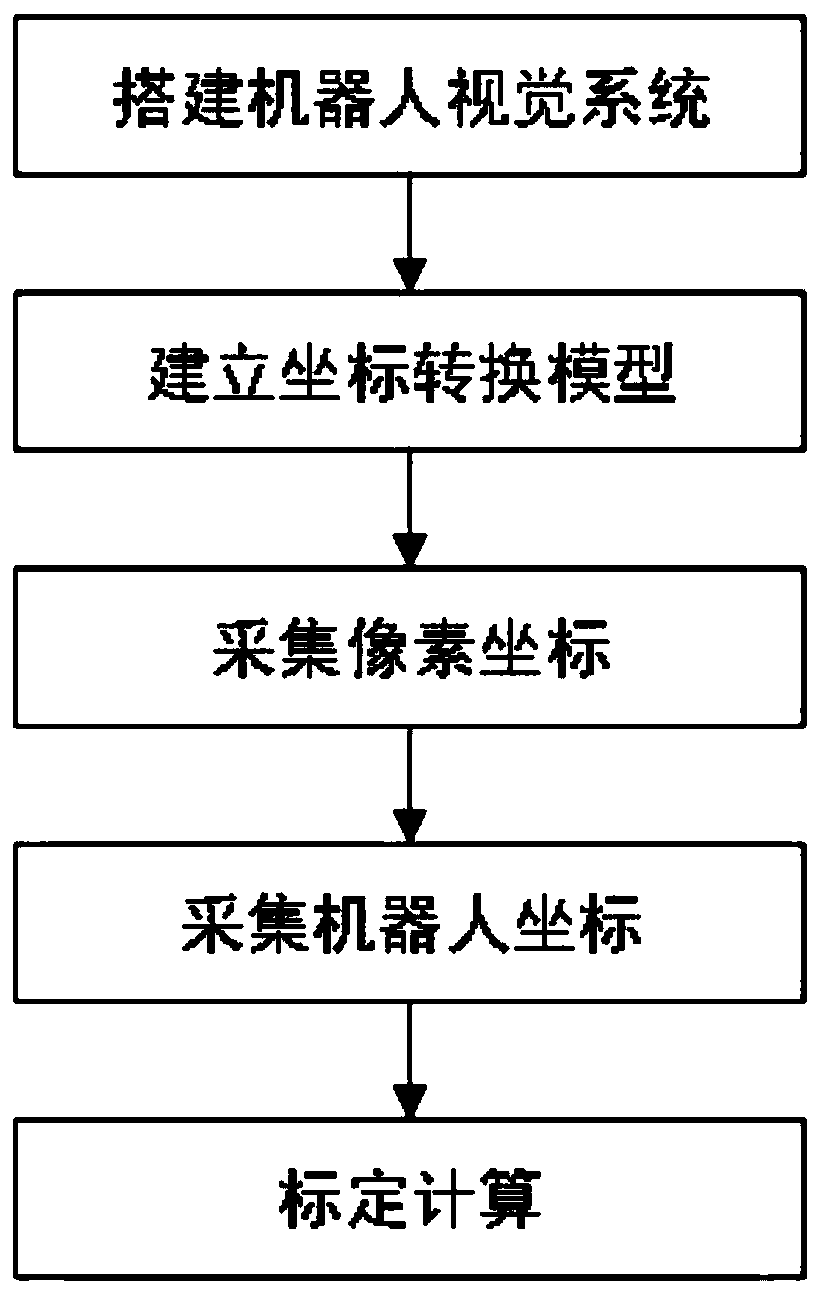
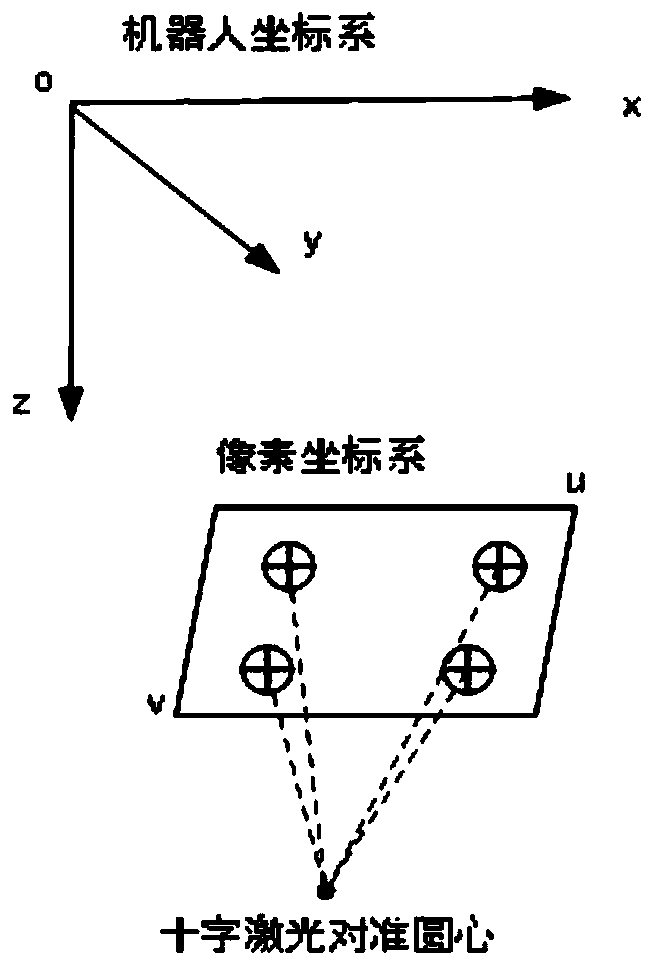
[0040] A robot vision calibration method based on a perspective transformation model. According to the perspective transformation principle between plane coordinate systems, the relationship between the pixel coordinate system and the robot coordinate system is established, and four sets of pixel coordinates and coordinates are collected by using four non-collinear mark points. Robot coordinates, calibration and calculation of coordinate transformation model parameters, used for vision-guided robot positioning. Process such as figure 1 As shown, it specifically includes the following steps:
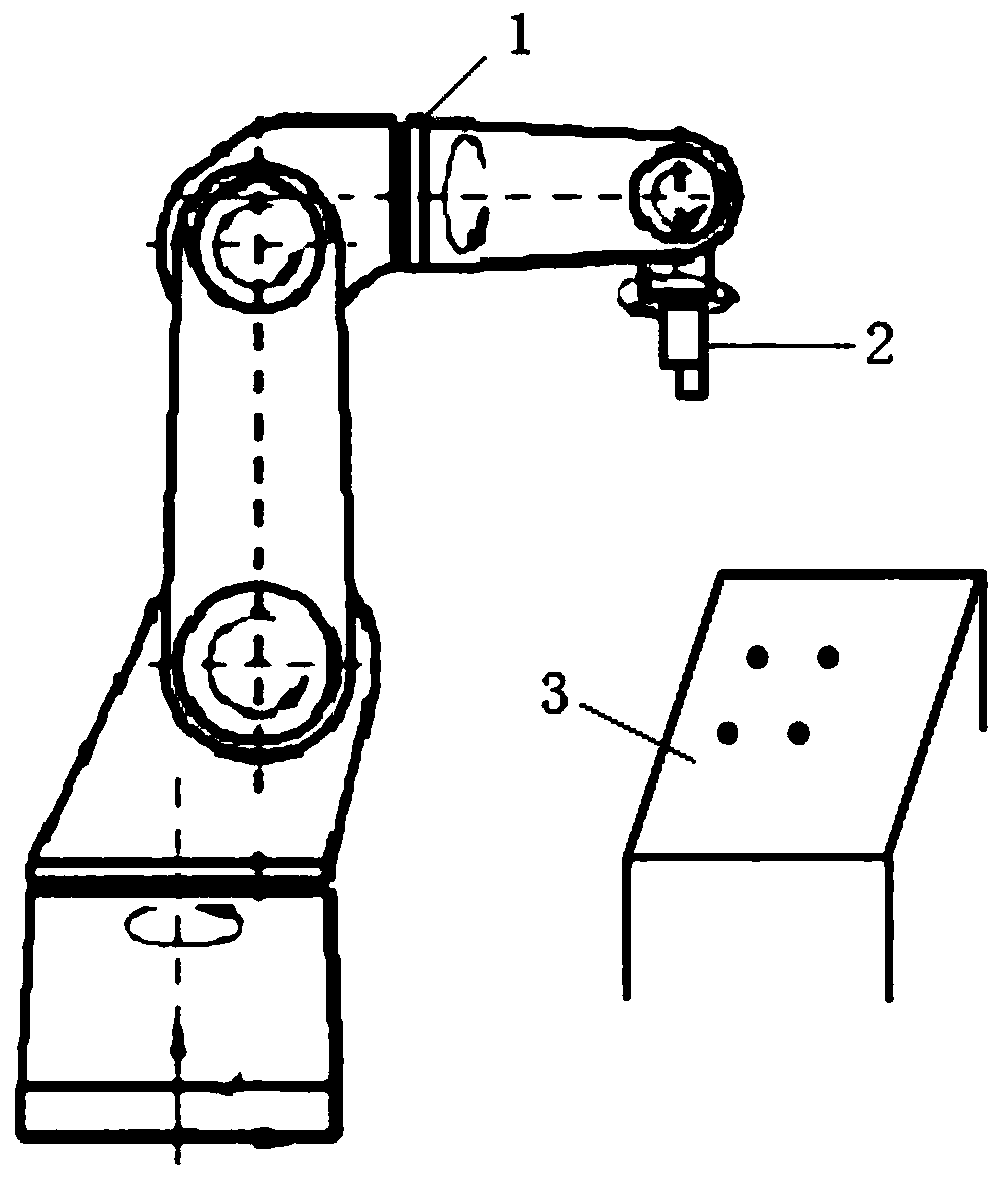
[0041] S1: Build a robot vision system. Taking the terminal camera as an example, the robot vision system such as figure 2 As shown, a camera 2 is installed at the end of the industrial six-axis robot 1, and the camera 2 moves with the end of the robot 1. The camera shoots downwards, and keeps the height constant when taking pictures; the height of the picture can be determined by the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More