

Upper limb rehabilitation robot control method based on adaptive online learning
A rehabilitation robot and adaptive controller technology, applied in computer control, program control, general control system, etc., can solve problems such as poor tracking performance, affect the wearer's movement, endanger the wearer's safety, etc., and achieve strong anti-interference ability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
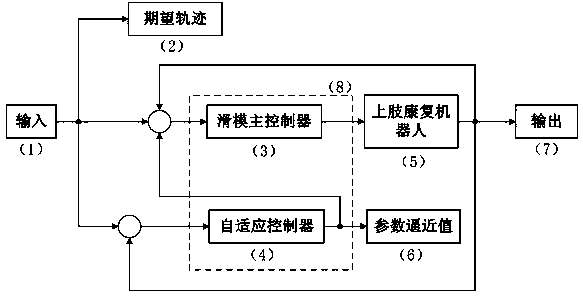
[0040] A control method for an upper limb rehabilitation robot based on adaptive online learning, the specific steps are as follows:
[0041] a. Establish the model of the upper limb rehabilitation robot:
[0042] For the single arm (left arm or right arm) model of the upper limb rehabilitation robot, only the shoulder joint and elbow joint of the single arm are considered, the model is simplified, and the dynamic model of the upper limb rehabilitation robot is established by using the Lagrangian dynamic equation as follows:
[0043]
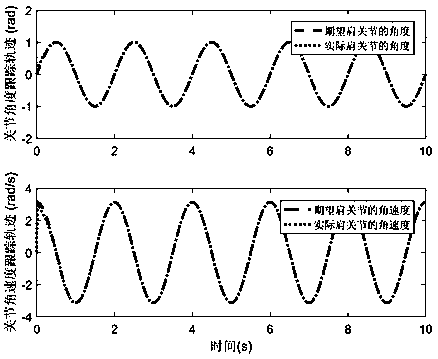
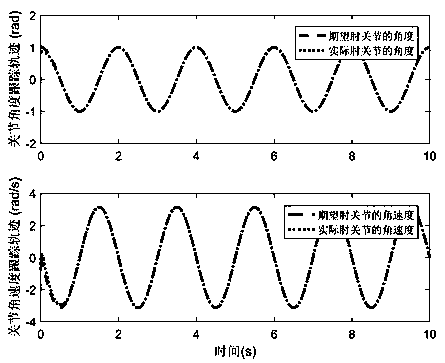
[0044] where q=[q 1 q 2 ] T ,q 1 is the movement angle of the shoulder joint of the upper limb rehabilitation robot, q 2 is the motion angle of the elbow joint of the upper limb rehabilitation robot. m 1 =1kg, m 2 = 1.2kg, l 1 = 0.3m, l 2 =0.35m, g=9.8m / s 2 .
[0045] b. Adaptive online learning control
[0046] The upper limb rehabilitation robot controller based on adaptive online learning is as follows:
[0047]
[0048] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More