

A brain-inspired learning control method for a multi-degree-of-freedom robot
A technology of learning control and degrees of freedom, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of loss of overall approximation ability of NN, occupation, complicated design and analysis process, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0061] The brain-like learning control method of the multi-degree-of-freedom robot of the present embodiment comprises the following steps:
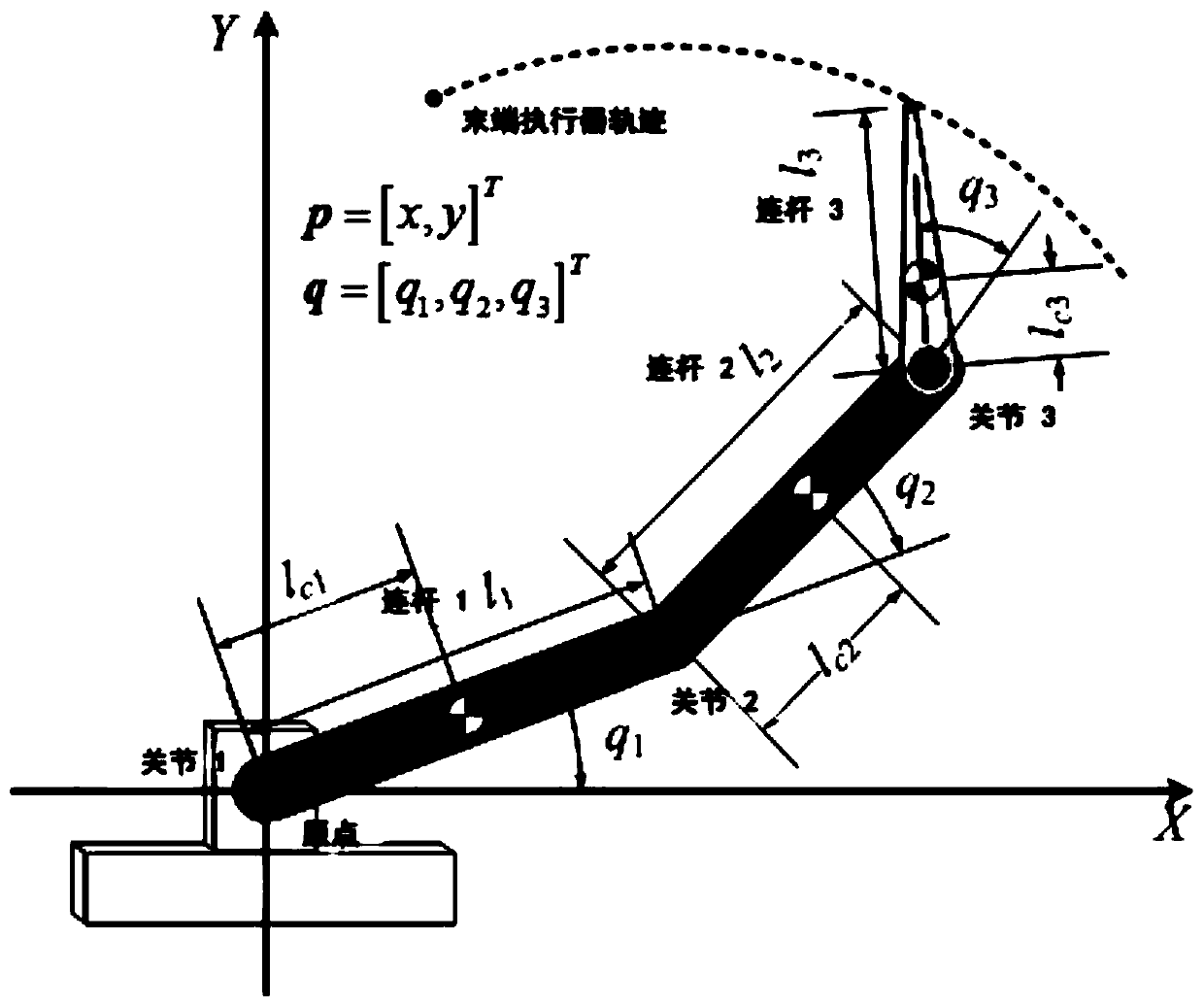
[0062] Step 1, establishing a multi-degree-of-freedom robot system dynamics model;
[0063] For a rigid electric-driven manipulator with n rotating joints, the dynamic equation is:
[0064]
[0065] Among them, q=[q 1 ,...,q n ] T ∈ R n , represent joint angular displacement, joint angular velocity and joint angular acceleration vector; D(q)∈R n×n is a symmetric positive definite inertia matrix, is centripetal force and Coriolis moment, G(q)∈R n and are gravity and friction respectively, δ(t)∈R n Represents external disturbance and modeling uncertainty; u∈R l input signal for the system control, Represents the nonlinear mapping between the actual torque generated by the joint motor and the contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More