Multi-target tracking method and face recognition method
A multi-target and target technology, applied in the field of computer vision, can solve the problems of unrepairable feature information F, uncorrectable errors, low matching accuracy, etc., to achieve the effect of taking into account calculation efficiency and matching accuracy, improving matching accuracy, and simple calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
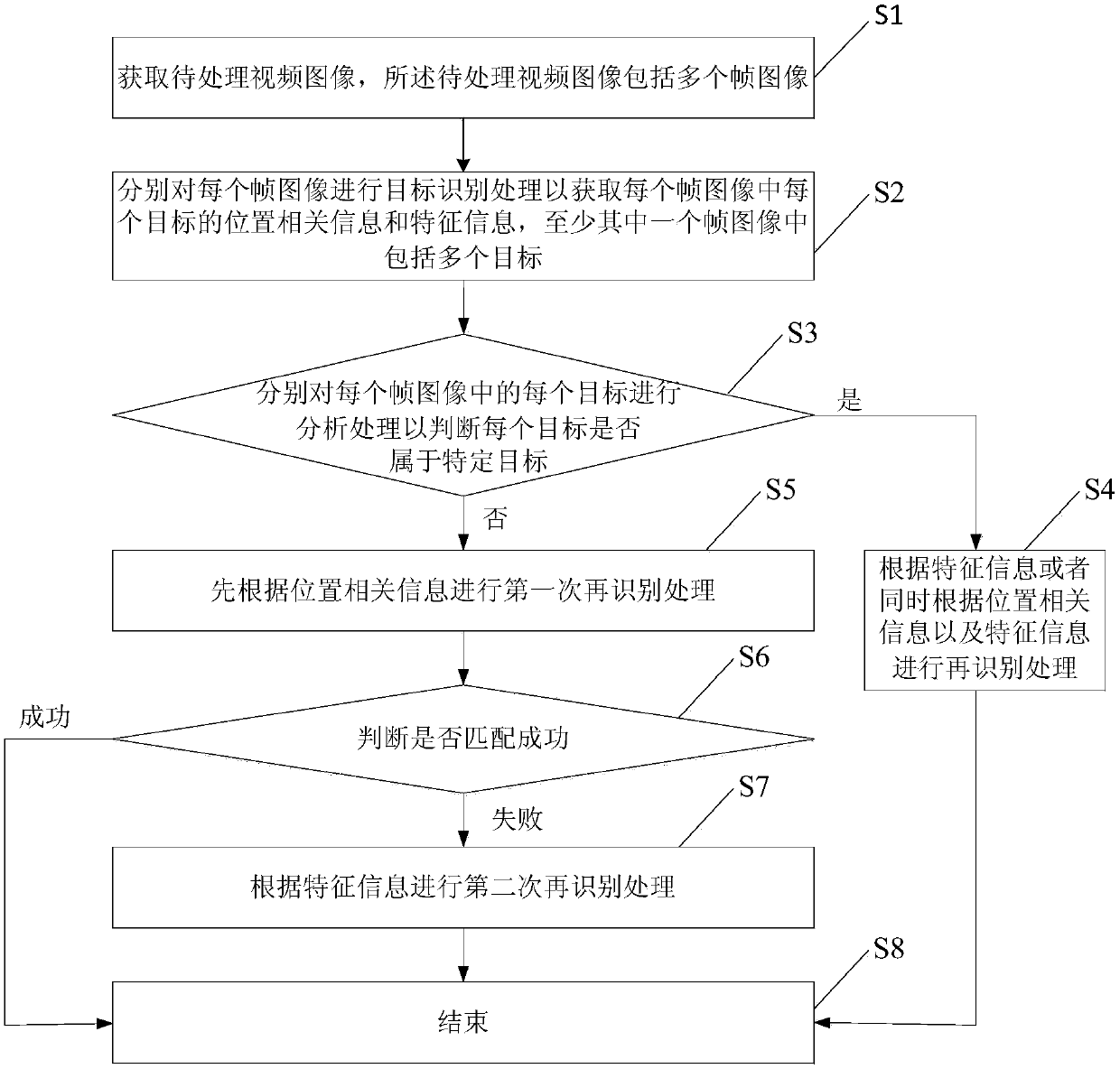
[0036] As mentioned in the background technology section, the ReID processing logic in the prior art is fixed. After the target recognition processing is performed on the frame image, the position-related information is used to perform the first ReID, and the feature information that is not successfully matched is restarted. Second ReID. Since the time and place of image shooting are random, and the light, angle, and posture are different, and the object is easily affected by factors such as detection accuracy and occlusion, the matching accuracy of this method is relatively low.
[0037] In order to make the above objects, features and advantages of the present invention more comprehensible, specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0038] The method in this embodiment is mainly implemented by computer equipment; the computer equipment includes but not limited to network equipment and user ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



